此文章之範例適用於下列條件:
TMflow 軟體版本: 2.14 或以上。
TM 手臂硬體版本:HW5.0
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
安全功能列表 #
| SF# | Name | 機器人停止功能 | 停止類別 | 架構類別 | PL |
| SF0 | Robot Stick ESTOP | 緊急停止 | 類別1停止 | 架構類別3 | d |
| SF1 | User Connected ESTOP Input | 緊急停止 | 類別1停止 | ||
| SF2 | Encoder Standstill Output | (安全輸出) | |||
| SF3 | User Connected External Safeguard Input | 保護性停止 | 類別2停止 | ||
| SF4 | Additional Joint Torque Monitoring | 保護性停止 | 類別2停止 | ||
| SF5 | Joint Position Limit | 保護性停止 | 類別2停止 | ||
| SF6 | Joint Speed Limit | 保護性停止 | 類別2停止 | ||
| SF7 | Speed Limit | 保護性停止 | 類別2停止 | ||
| SF8 | Additional Force Limit | 保護性停止 | 類別2停止 | ||
| SF9 | User Connected External Safeguard Input for Human–Machine Safety Settings | (更改安全參數) | |||
| SF10 | Robot ESTOP Output | (安全輸出) | |||
| SF11 | User Connected External Safeguard Output | (安全輸出) | |||
| SF12 | Robot Human–Machine Safety Settings Output | (安全輸出) | |||
| SF13 | Robot Recovery Mode Output | (安全輸出) | |||
| SF14 | Robot Moving Output | (安全輸出) | |||
| SF15 | User Connected Enabling Switch Input | 保護性停止 | 類別2停止 | ||
| SF16 | User Connected ESTOP Input without Robot ESTOP Output | 緊急停止 | 類別1停止_ | ||
| SF17 | Cartesian Limit A | 保護性停止 | 類別2停止 | ||
| SF18 | Cartesian Limit B | (更改安全參數) | |||
| SF19 | Robot Stick Enabling Switch | 保護性停止 | 類別2停止 | ||
| SF20 | Reset Output | (輸出功能) | |||
| SF21 | Robot Stick Reset | (重置安全狀態) | |||
| SF22 | Enabling Switch on End-module | 保護性停止 | 類別2停止 | ||
| SF23 | User Connected External Bumping Sensor Input | 保護性停止 | 類別2停止 | ||
| SF24 | End-Point Reduced Speed Limit | 保護性停止 | 類別2停止 | ||
| SF25 | User Connected MODE Switch Input | (更改安全參數) | |||
| SF26 | User Connected Reset Input | (重置安全狀態) | |||
| SF27 | User Connected Soft Axis Settings Switch Input | (更改安全參數) | |||
| SF28 | Enabling Switch Output | (安全輸出) | |||
| SF29 | MODE Switch Output | (安全輸出) | |||
| SF30 | Safe Home Output | (安全輸出) | |||
| 註:
1. 停止類別符合 IEC 60204-1。 2. 架構類別符合 ISO 13849-1:2015。 3. 符合 ISO 13849-1:2015 的 PL(性能等級)。 |
|||||
改進與應用情境 #
- 所有安全功能均為 PL = d,Cat.3
| TRSS5.0(TECHMAN Safety System 5.0)中的所有31個安全功能都符合ISO 13849-1:2015的安全設計,並通過了TÜV NORD的PL=d Cat.3架構認證。這些安全功能的設計符合ISO 10218-1:2011和ISO/DIS 10218-1:2023的要求。 |  |
- 符合未來市場的最新 ISO/DIS 10218-1:2020
雖然ISO/DIS 10218-1:2020尚未公佈,但TRSS5.0是根據該版本設計的。為了滿足要求和未來的市場趨勢,TRSS5.0增加了某些安全設計:
- SF2- Encoder Standstill Output
ISO/DIS 10218-1:2020: The safety function shall provide a safety function output when the robot is in a monitored standstill condition.
SF2 Encoder Standstill Output為一安全輸出功能,通過關節編碼器監測每個機器人關節編碼器在觸發2類停機後在固定時間內的運動。如果關節編碼器的運動超過了可接受的範圍,機器人將執行0類停機。
- SF19- Robot Stick Enabling Switch
ISO/DIS 10218-1:2020: Each teach pendant that can initiate motion or cause movement(s) shall have an enabling device in accordance with 5.13.
| SF15 User Connected Enabling Switch Input和SF19 Robot Stick Enabling Switch是為了在手動模式下Enabling Switch處於ON狀態時允許手動控制操作。 SF22 Enabling Switch on end-module是為了在手動模式下end-module上的Enabling Switch處於ON狀態時允許機器人手拉引導教學。 | 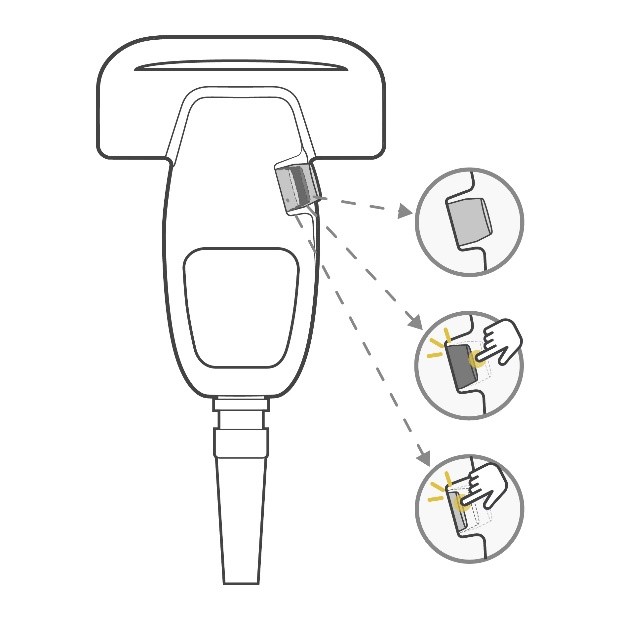 |
- SF24- End-Point Reduced Speed Limit
ISO/DIS 10218-1:2020: With the reduced-speed safety function, the speed of the TCP and the endpoint(s) of each joint of the manipulator shall not exceed 250 mm/s including the effects of any auxiliary axis. It should be possible to select speeds lower than 250 mm/s as the maximum limit.
The robot shall have reduced-speed safety function to enable limiting the end-effector or workpiece speed(s) to 250 mm/s or less. This safety function shall be used with reduced-speed manual mode. Figure 2 shows the end-points of each joint of the manipulator.
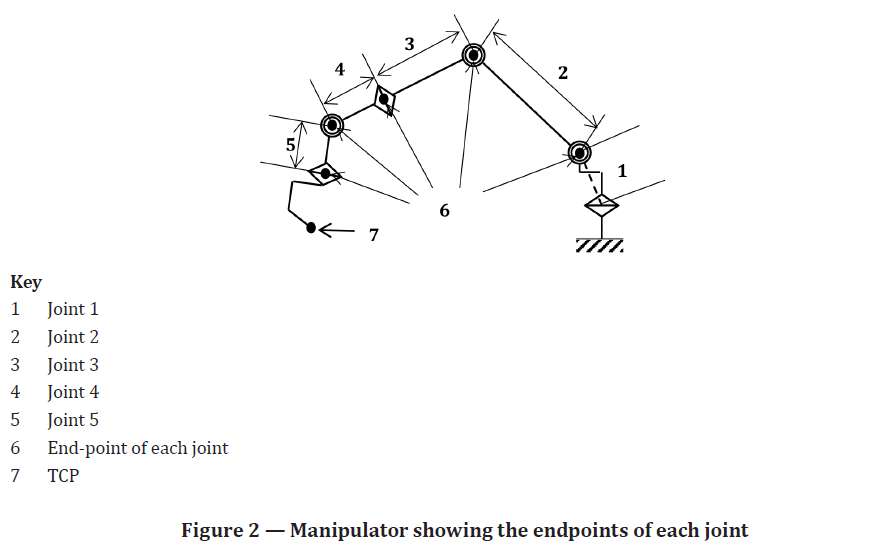
(圖 2 來自 ISO/DIS 10218-1:2020)
| SF24提供了一個安全功能,以設置機器人end-point速度的限制。當任何機器人end-point超過T1模式下的設定限制時,將啟動第二類停機。 | 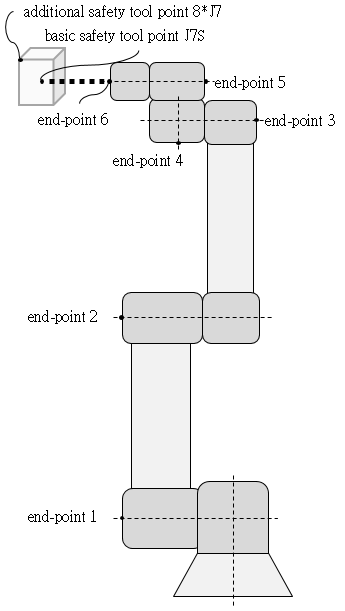 |
- Enabling Switch on End-module
| 因為在手動模式下ISO/DIS 10218-1:2020 Enabling Switch是強制性的,一隻手按著Robot Stick Enabling Switch,另一隻手按著FreeBot來拖動機器人既不方便也不符合人體工學。 |  |
| 因此,在S系列機器人的end-module上提供一個安全等級的Enabling Switch。在手動模式下, SF22 Enabling Switch on end-module被設計為在末端模塊上的Enabling Switch處於ON狀態時,機器人可以被使用者手拉引導教學。由此可以雙手更容易地拖動機器人。 | |
- Safety-rated RESET 功能
| 保護性停機是為了保護操作員不受傷害。根據ISO 10218-1:2011和ISO/DIS 10218-1:2020,保護性停機的復位可以是自動的,也可以是手動的。但如果安全功能的復位功能不是安全等級的,就會使操作者處於危險之中。可能的情境為,觸發一保護性停止功能,例如光柵的保護功能,被設置為手動復位。操作員走過光柵,機器人系統停止,但非安全等級的RESET功能出錯,讓系統復位。機器人系統恢復運動,造成操作員傷亡。 |  |
| 為了避免上述情況,TRSS5.0設計了安全等級的RESET功能,這樣可以確保任何安全停止的恢復。 | |
- Auto Mode-only Safeguard 功能
| 在某些情況下,機器人系統已經整合好安全裝置,例如安全雷射掃描儀,並且可以正常工作。但如果有天需要重新示教編程點,會很難移除或暫停雷射掃描儀功能,因在安全裝置觸發期間機器人不能有移動或有任何運動,使用者必須先移除安全裝置,方能重新示教機器人。 | 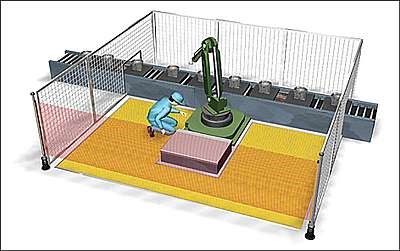
(示例圖片來自網絡) |
| 為了避免上述情況,TRSS5.0 設計了 Auto Mode-only 保護功能。如果配置了這個功能,在手動模式下,Safguard功能將無效。而Enabling Switch仍能確保使用者的安全。 | |
- 清楚地本地控制與遠端控制
當使用者使用機器人控制器(Robot Stick)來控制器人時,機器人將完全處於本地控制狀態下,確保機器人不會接受外部指令而進行動作。安全性可以得到完全地保護。根據機器人控制器的狀態和操作,本地控制和遠端控制可以如下表所示:
| Robot Stick功能的
啟用/未啟用狀態 |
操作使用 | ||
| 本地控制 | 啟用,開 | • Robot Stick
• TM Teach Pendant |
|
| 遠端搖控 | 未啟用,關閉 | • 外部IO連接
• 外部Fieldbus指令 |
- Safe Home Output功能
| 當機器人整合在無人搬運車(AGV)上時,機器人只能在AGV到站點時移動,並且只有在機器人完成站點任務後,AGV才能帶著機器人離開站點。 |  |
| 此外,當AGV離開站點時,機器人的姿態很重要。如果出現錯誤,例如錯誤的編程、機器人固有的保護停止、非安全等級故障等, AGV可能會載著處於非預期姿態的機器人離開站點,這將造成AGV移動時產生風險。例如,如果機器人的姿態延展到AGV以外的區域,機器人可能會撞擊並壓傷人員。
因此,TRSS5.0設計了一個Safe Home Output功能,以方便與AGV行進系統整合。使用者可以根據自己的應用情境設置機器人的Safe Home。 如果超出Safe Home姿態,將會有一輸出發出。應用情境包含: 1. 使用者可以將機器人的Safe Home Output連接到無人搬運車(AGV)的緊急/保護停止功能(如果有提供)。 2. 當機器人不在Safe Home姿態時,AGV不應該移動。只有在機器人處於Safe Home姿態時,AGV才能移動。 |
|


