此文章之範例適用於下列條件:
TMflow 軟體版本: 2.16 或以上。
TM 手臂硬體版本: HW3.2 或以上。
其他特殊軟硬體需求: 無
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
1. TM25s #
◊ 主要特點: #
- 最大容許負載達25 公斤,可用於取放較重的工件。
- 手臂重量僅6公斤(適用配有相機的機型)、工作範圍為同負載能力競品中最大:1902 mm。
- 適用於堆棧/解棧多個箱體。

2. TCP Calibration Kit #
◊ 主要特點: #
- 協助客戶快速自動校正TCP、複製產線、更換機械手臂。
3. TMflow 相關功能 #
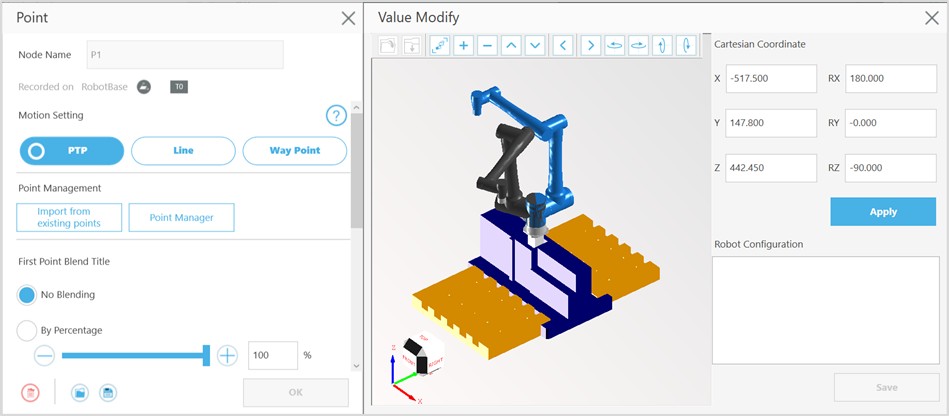
◊ 點位/座標系管理員數值修改 #
- 使用者可無需計算於點位/座標系管理員中編輯數值與與座標系軸向座標偏移。
- 在點位管理員:
- 點擊該點位後之鉛筆圖示編輯該點位。
- 選擇卡氏座標或關節角度,然後按數值修改。
- 在對應欄位中輸入值,按套用然後按儲存。
- 在座標系管理員:
- 點選座標系後之鉛筆圖示編輯該座標系。
- 點選數值修改。
- 在對應欄位中輸入值然後按儲存。
◊ TMcraft Shell #
- 解決方案提供者可於機器人控制器上開發全螢幕運作之UI。
- 於TMflow運作之客製HMI
- 匯出/匯入TMcraft Shell
- 設定/啟用TMcraft Shell
- 更新TMcraft API:新增TMcraftShellAPI
◊ TMcraft Toolbar #
- 解決方案提供者可以開發客製Toolbar介面,提供使用者簡單且友善之體驗。
- 可用於TMflow中之客製Toolbar介面
- 匯入/匯出TMcraft Toolbar
- 工具列設定僅適用於一個Toolbar UI
- 更新TMcraft API:新增TMcraftToolbarAPI
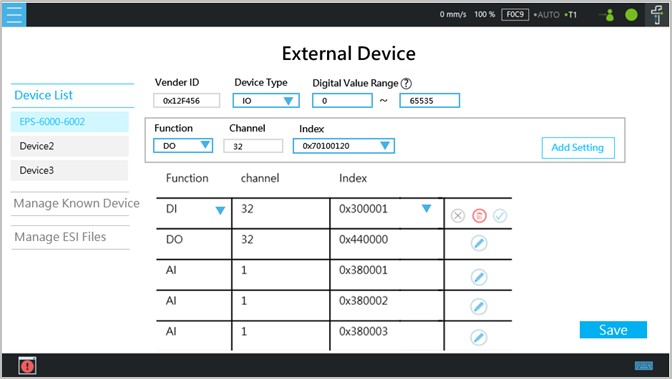
◊ 支援客製EtherCAT設備 #
- 使用者可以定義其EtherCAT設備於TMflow中使用。.
- 支援客製EtherCAT設備
- TMflow擴充裝置設定頁面可讓使用者設定EtherCAT IO之數量和索引,透過TMflow之IO控制介面整合使用外部IO設備
- 匯入客製EtherCAT設備之ESI檔
◊ Script指令支援Path Offset #
- 新增path offset與相關函數,用於即時調整僅適用於script指令之機器人運動軌跡
- 可自訂正弦波、方波等路徑
- 可以感測器輔助路徑調整,如焊接追蹤
- 可使用外部控制裝置,如外接搖桿控制裝置
◊ 錯誤停止後繼續執行 #
- 碰撞或緊急停止引起之錯誤停止可以從錯誤位置恢復
- 若啟用從錯誤發生位置繼續運作專案,則碰撞或ESTOP所造成的機器人停止, 可以從錯誤發生位置(PE)繼續運作專案。 排除錯誤後,按壓PLAY讓機器人從目前位置移到PE,再次按壓PLAY繼續運作專案
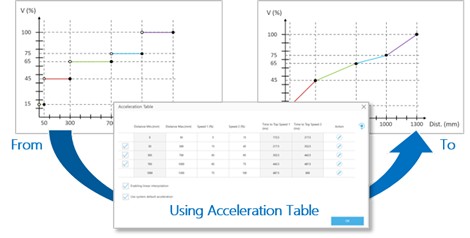
◊ 自動加速配置工具 #
- 運動節點之速度與達到最高速度時間,遵循此功能將由系統內部計算建議值。
- 加速時間提供不同距離下之速度與加速建議,幫助使用者無需重複測試即可進行調整。
- 使用者無需單獨測量與調整各節點。
◊ 負重轉換 #
- 便於使用者實施有效負重變更,同時減少有效負重變更安全錯誤回報
- 使用者可啟用運動節點中的負重轉換功能,於特定距離與時間內更新負重變化,從而減少負重變更期間之安全錯誤。
◊ Force與Torque監控配置 #
- 提供使用者配置更force與torque監控類型,配合不確定/未知之負重應用,如混箱堆棧。
- 使用者可依據應用選擇不同之force與torque監控類型。對於負重未知之應用,於確保無人接近機器人的時間內,使用者可關閉force與torque限制功能。
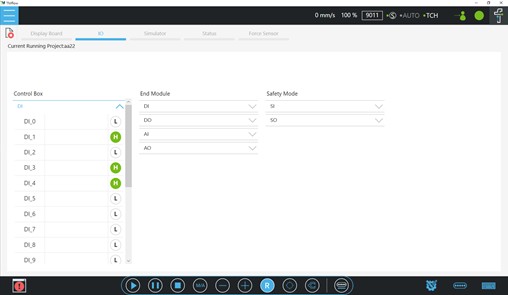
◊ TMflow “Simulator” #
- 供使用者以離線方式建立、編輯或執行專案來驗證程序。無需停止真實機器人來測試程序。
- 使用者可利用TMflow “Simulator” 建立、編輯和運行專案,包含DI/AI控制,以驗證程序與應用程式。
- 使用者可使用TMflow “Simulator” 測試Listen Node和Network Node通訊。
- 使用者可於開發完成後立即測試TMcraft Shell和Toolbar。
- 使用者可如於真實機器人中般測試、匯入和匯出專案。

◊ 單步執行調整 #
- 使用者可於單步執行中選擇更快的速度。在單步執行中將速度選項變更為5%、1%、3%、5%與7%。
4. TMvision 相關功能 #
◊ TMflow專案化自動TCP 校正 #
- 以專案形式運行自動TCP校正。達明機器人會提供專案讓使用者下載匯入,專案只需進行簡單的基本設定,即可一鍵全自動運行。運行完成就能獲取準確的TCP數值。
- 專案形式校正具備下列優勢::
- 使用者可調整專案速度,二分鐘內完成校正。
- 自訂校正點位,適用任意工具進行校正。
- 校正點位含碰撞偵測功能,避免校正過程中發生碰撞(需匯入3D 環境檔)。
- 首次使用校正專案時完成初始設定後,在相同環境下只需一鍵運行即可完成校正。
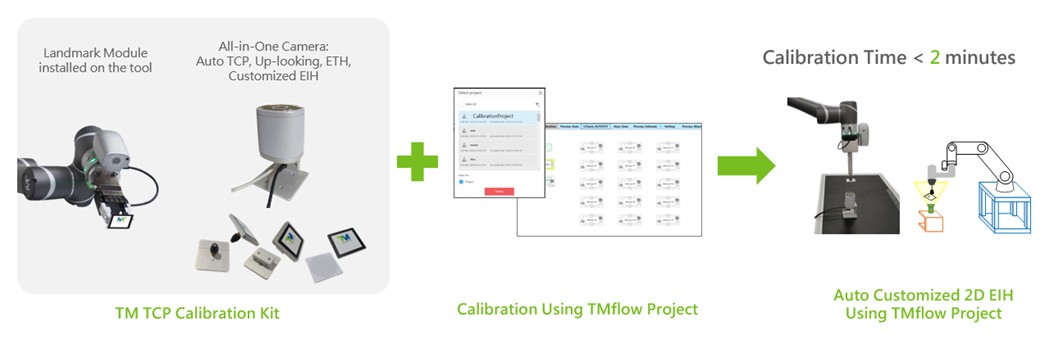
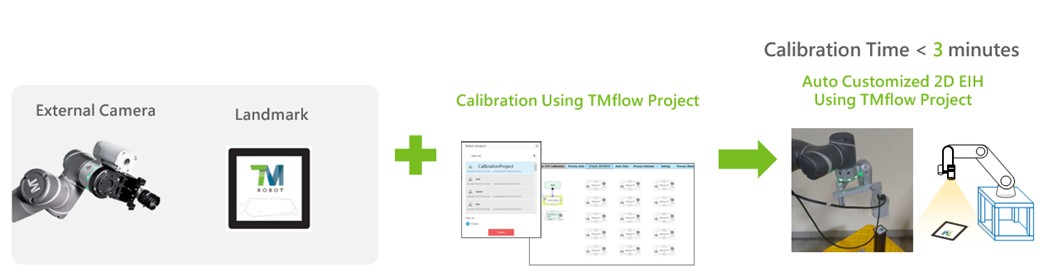
◊ TMflow專案化自動自定義2D眼在手校正 #
- 以專案形式運行自動自定義2D眼在手校正。達明機器人會提供專案讓使用者下載匯入,專案只需進行簡單的基本設定,即可一鍵全自動運行。運行完成就能獲取準確的2D手眼關係。
- 專案形式校正具備下列優勢:
- 使用者可調整專案速度,三分鐘內完成校正。
- 自訂校正點位,外掛相機可於任何裝設位置進行校正。
- 校正點位含碰撞偵測功能,避免校正過程中發生碰撞(需匯入3D 環境檔)。
- 首次使用校正專案時完成初始設定後,在相同環境下只需一鍵運行即可完成校正。
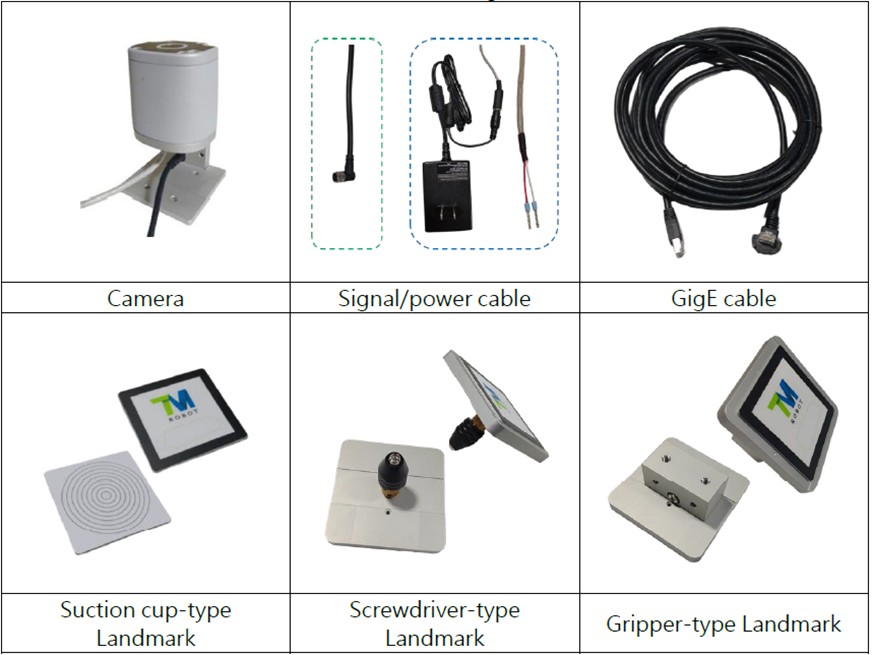
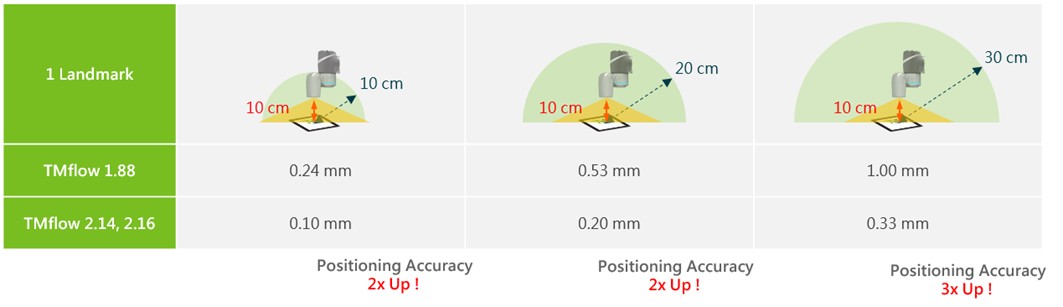
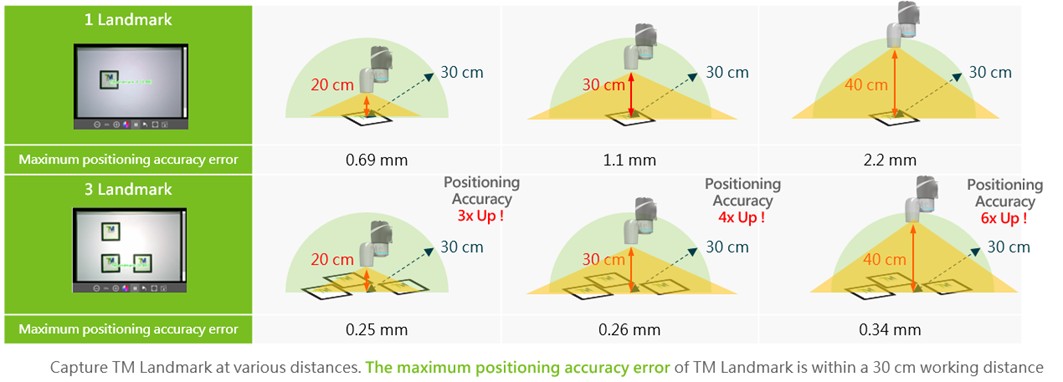
◊ TM Landmark 定位精度提升 #
- Capture TM Landmark at 10 cm. The maximum positioning accuracy error of TM Landmark within different working distances.
在10公分的距離拍攝TM Landmark。TM Landmark在不同拍攝距離下的最大定位精度誤差。 - 我們一直致力於提高TM Landmark的精確度。在TMflow 2.14/2.16中,單一TM Landmark定位任務比起88版本,在定位精度上提升了2-3倍。
- TM Landmark的整體定位精度顯著提升,並且能支援更遠的工作距離。
◊ 以 3 個TM Landmark創建視覺座標系 #
- 3個TM Landmark可大幅提升視覺定位精度,不同拍攝距離下約有3至6倍的定位精度提升 (相比於1個TM Landmark)。達明機器人AI Cobot拍攝3個TM Landmark後可獲得6個自由度的定位資訊,包括X、Y、Z、RX、RY、RZ,並依此建立座標系。
- 3個TM Landmark建立的視覺座標系原點與軸向定義如下:
 5. TM AI+ 相關功能 #
5. TM AI+ 相關功能 #
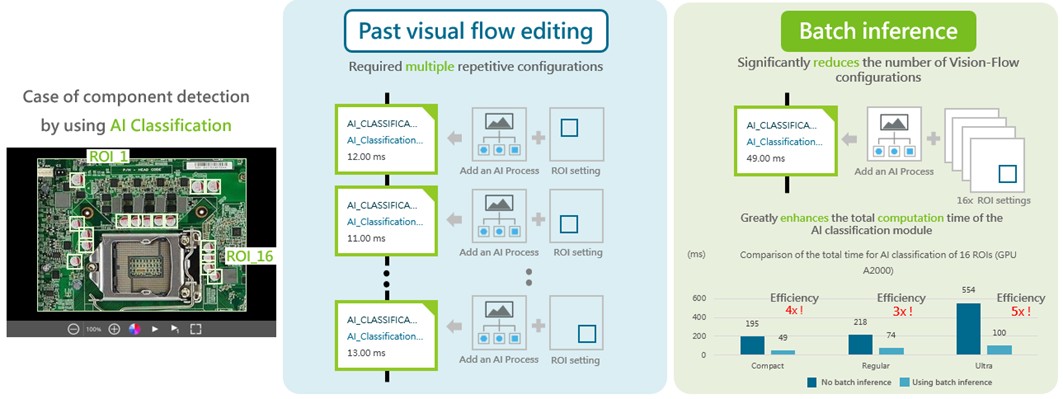
◊ AI分類支援多重ROI與批次推論 #
- 於執行AI分類任務時建立多個感興趣區域,藉此減少運行時間。
- 使用者可為多重ROI影像同時執行設定AI分類模型,以減少週期時間。
- 以AI分類多重ROI設定進行批次推論。
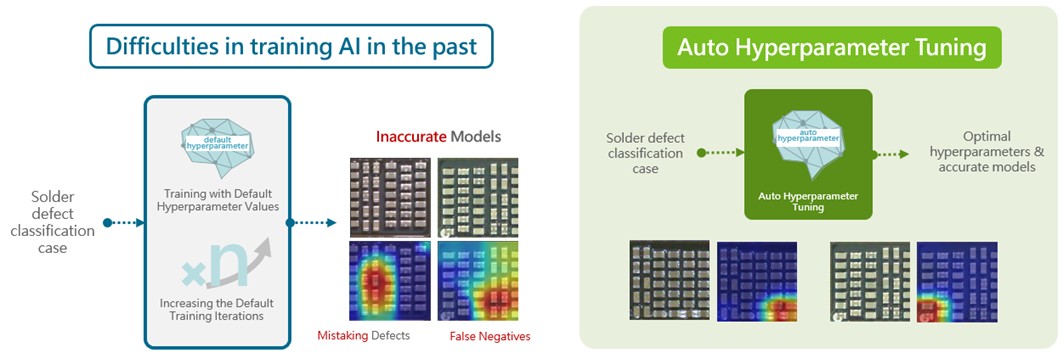
◊ 自動超參數調整 #
- 使用者不須自行調整AI分類的訓練參數。
- 於分類專案參數設定中新增自動超參數調整選項。
- 開啟後,可設定時間上限。數值範圍為1~12,單位為小時。訓練將於時間限制內完成。
- 管理員可開啟或關閉使用者自動超參數調整的權限。
 6. 更多功能 #
6. 更多功能 #
◊ 新增SCHUNK Axia80及WACHOH_WEF_WKF_115200至力規清單 #
- 使用者可選擇SCHUNK Axia80及WACHOH_WEF_WKF_115200作為力規。
- 納入與ATI Axia80類似之SCHUNK Axia80及WACHOH_WEF_WKF_115200於力規清單中。
◊ ROI設定改善 #
- 重新設定ROI時顯示前一次的設定值。
- 使用者在設定現有的ROI時可參考前一次的設定值。
◊ 辨識量測與AI分類模組最大數量設定為20 個 #
- 於單一視覺任務使用更多辨識&量測或AI分類模組。
- IPC記憶體容量達16G或以上時,使用者可於單一視覺任務使用至多20個辨識&量測或AI分類模組。
◊ 一維/二維碼功能改善 #
- 改善條碼/QR二維條碼模組的穩定性。
- 增加條碼類型選項(1D Barcode/QR code、1D Barcode、2D Barcode)。增加多角度旋轉辨識功能(可由使用者啟用或停用)。
◊ 可配置之序列埠 #
- 無需使用實體轉換器修改串列埠通訊。
- 設定序列埠與終端模組I/O後,無需重新啟動。儲存後,系統可立即開始工作。


