Table of Contents
名詞解釋 #
Tools shift
- 使用不同的工具,執行相同的路徑
- 若工具磨損或使用不同工具完成相同路徑
- Tools shift又分為保持姿態以及保持路徑兩大類
Base shift
- 在不同的base上,執行相同的相對路徑
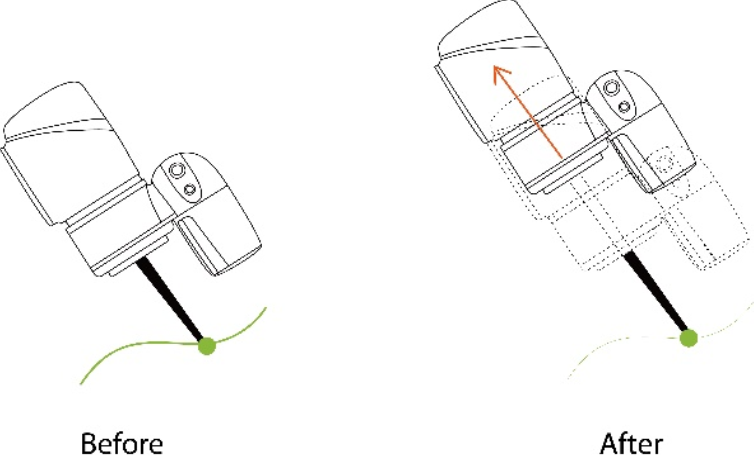
Tools shift 之 保持姿態 #
若機器人記錄路徑時,選擇的工具錯誤或未套用,則可利用工具偏移的保持姿態功能,將正確的工具的參數代入此節點,此設定不會造成機器人的姿態與位置改變,即專案執行時與原軌跡重疊。
如上圖,手臂動作與原本一致
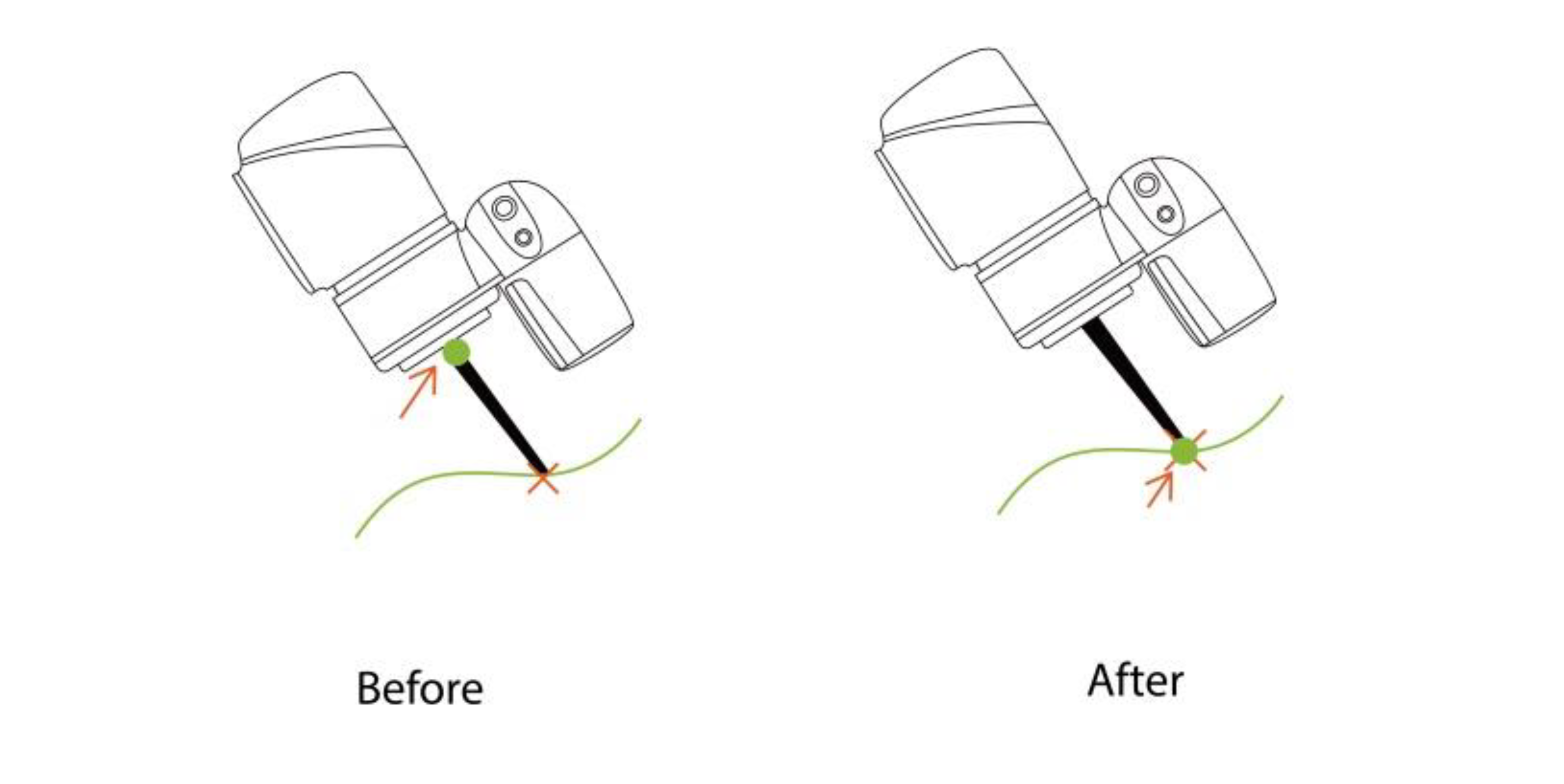
手臂將嘗試使新的工具座標系與舊工具的點位相同,進而改變機器人的姿態以符合紀錄於新工具之點位設定,但由於空間限制或手臂機構的限制,因此,不一定能被實現。
如上圖,TCP 末端點與原路徑保持一致
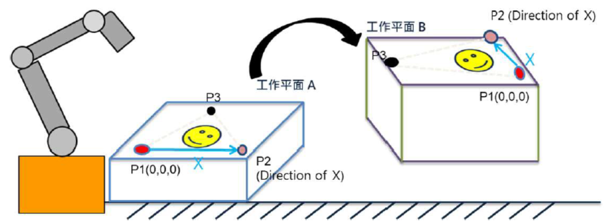
Base shift 的使用方式與情境 #
使用方式 : 將點位轉移至另外一個座標系,而不改變其相對於座標系的位置以及面向。在絕對位置改變的情況,維持相對位置不變。
在不同的工作平面完成相同之任務。