Table of Contents
Examples are valid for:
TMflow Software version: 1.76.6300 or above.
TM Robot Hardware version: All versions.
Note that older or newer software versions may have different results.
The relationship between the robotic robot and the camera, TM Robot supports the following three scenarios. #
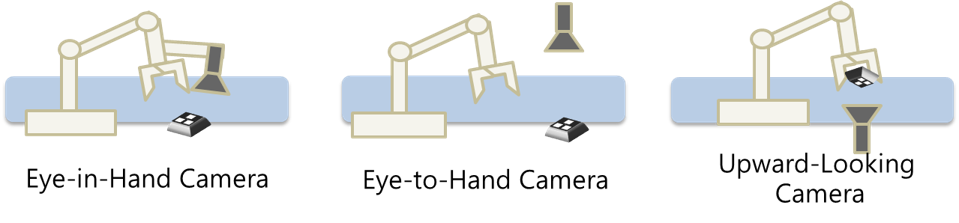
- Eye-in-Hand camera (Eye-in-Hand)
- Eye-to-Hand Camera (Eye-to-Hand)
- Upward-looking Camera
Difference between EIH/ETH #
| Pros | Cons | |
| ETH | •Thread can continue running
•Reduce the vision identify time |
•Position need to be fixed |
| EIH | •AGV can use
•Can identify at many different position/ angle |
•Takes time to identify(no thread) |


