Modbus Communications Protocol #
You can use Modbus Master Command to read/write the parameter such as position, pose, etc. in a register and use the parameter to edit the project or monitor the robot.
TM robot provides TCP/RTU communications protocol. The user can adjust according to the actual status. (Refer to chapter 2)
TM robot can have both TCP and RTU status. The user can obtain an external device of Modbus or robot register data. Third parties can also use an external device such as IPC, PLC, etc. to be the
master to send the command to obtain relevant information.
Note: In this Instruction page, Client is called Master; Server is called Slave.
Remark: Modbus table can be downloaded in the bottom of the page.
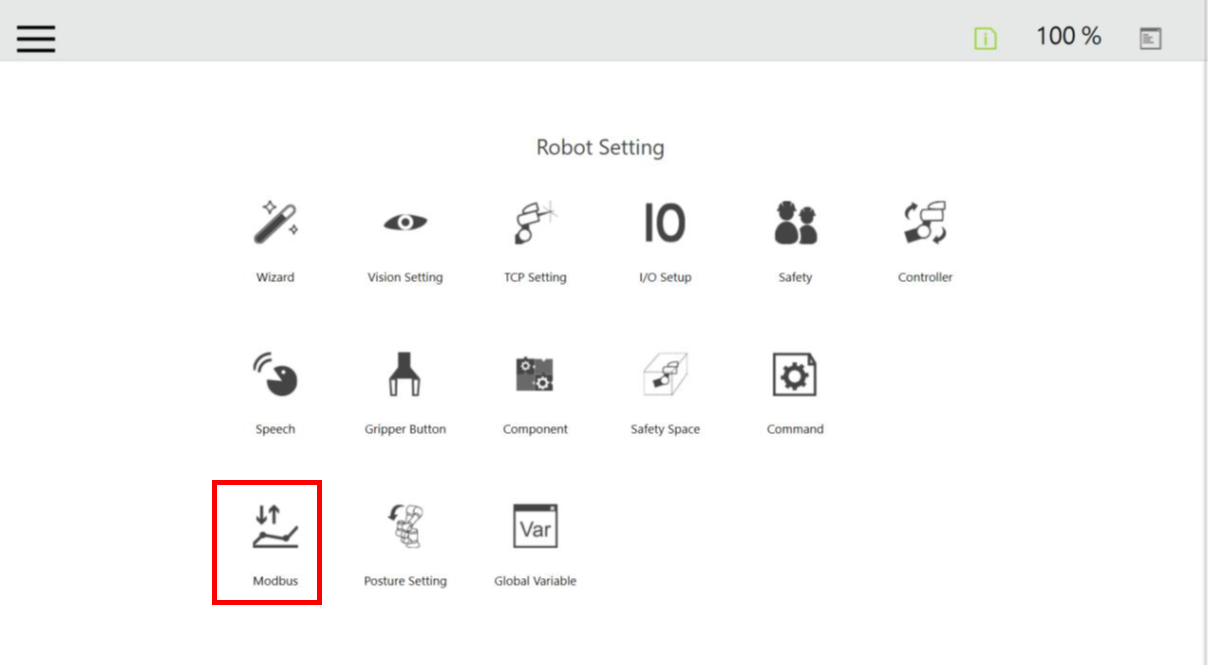
On the HMI (human-machine interface) setting page, click on Modbus to enter the “Modbus Slave” page
Modbus TCP architecture #
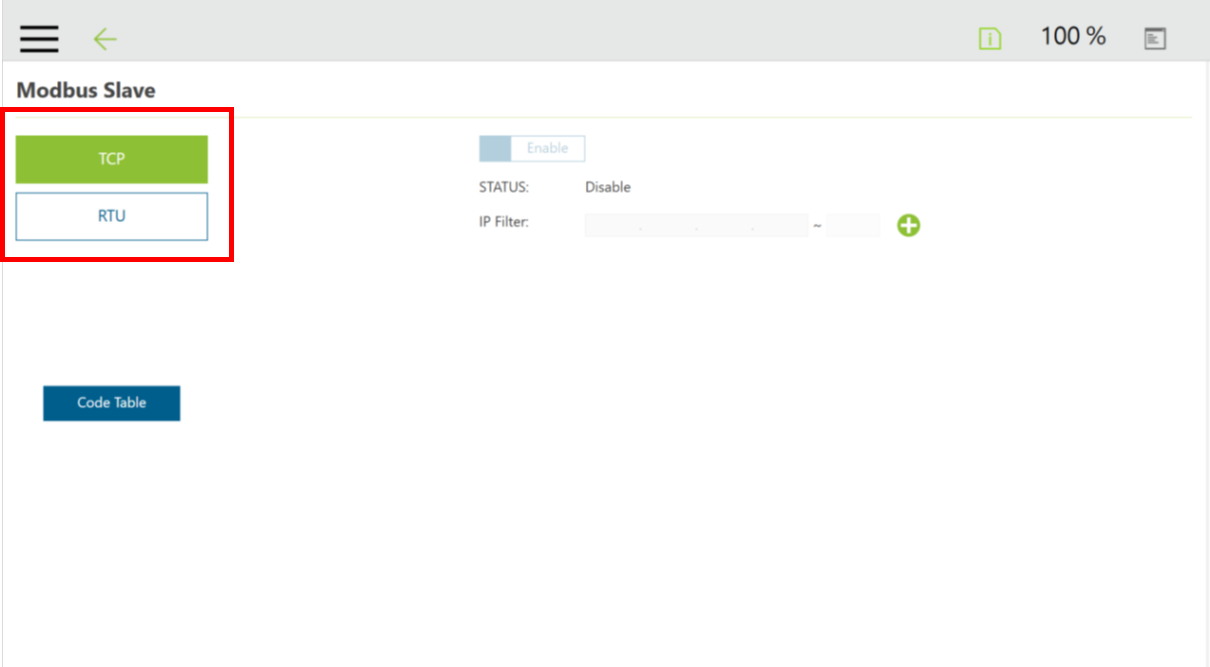
Modbus TCP communicates via RJ-45. There is only one RJ-45 connector that can be utilized to communicate in the control box. The setting page can check the IP filter and Modbus status.
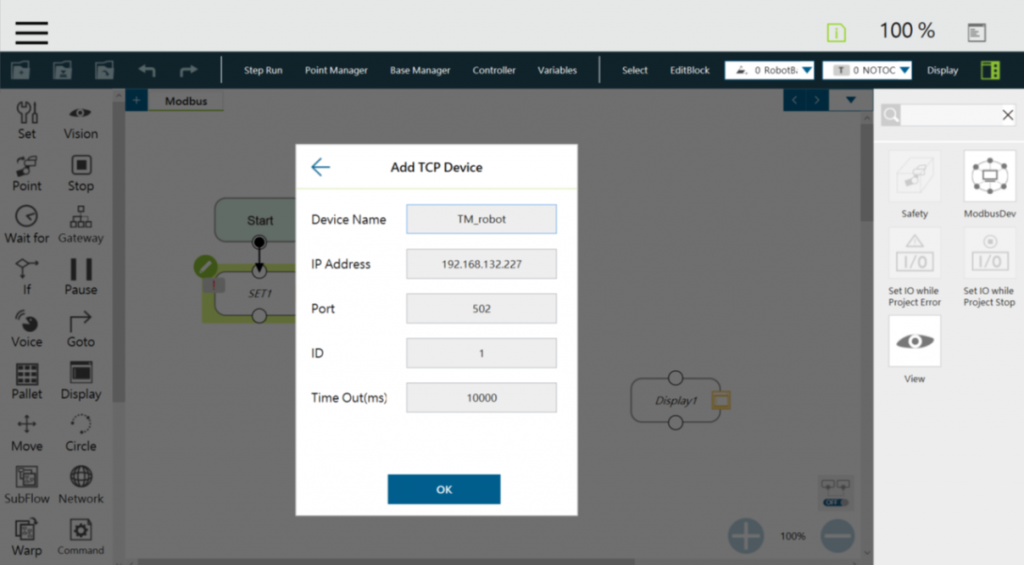
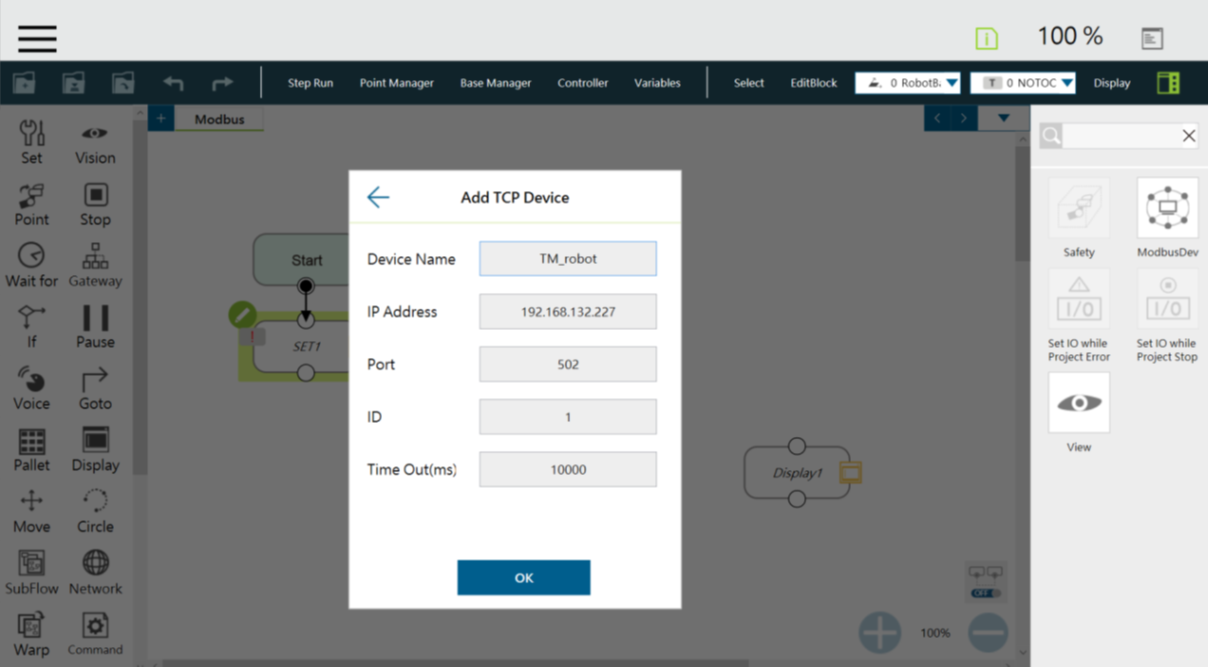
Add a TCP device #
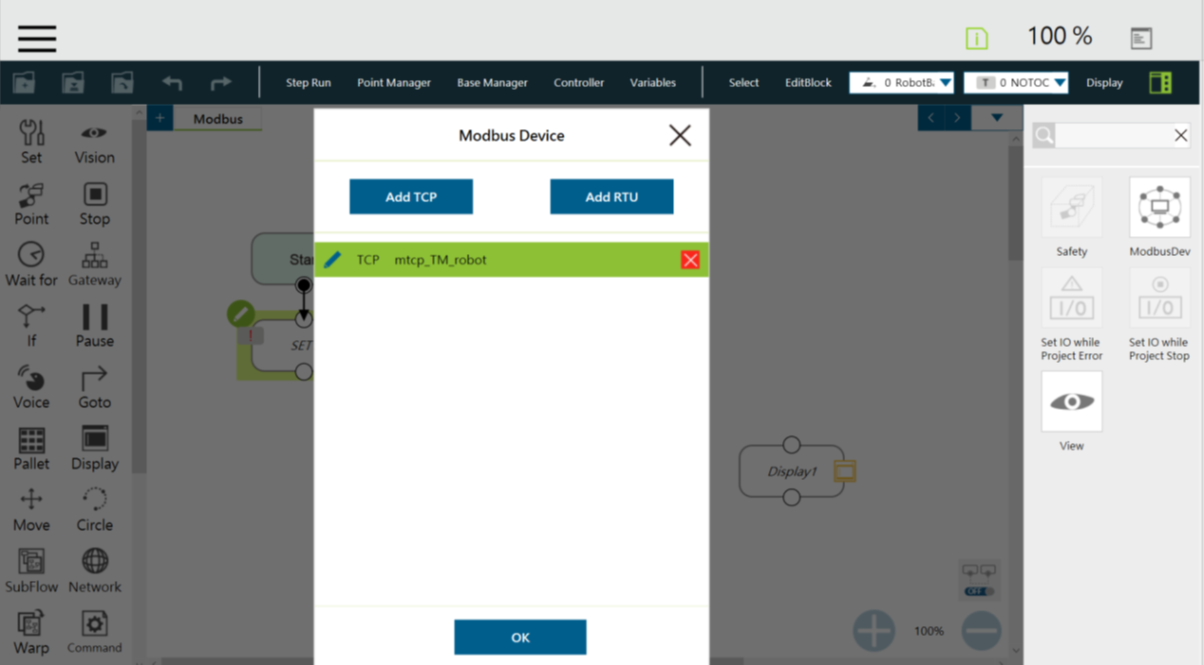
Click on the Modbus Device button on the right panel, users can add a ‘TCP device’.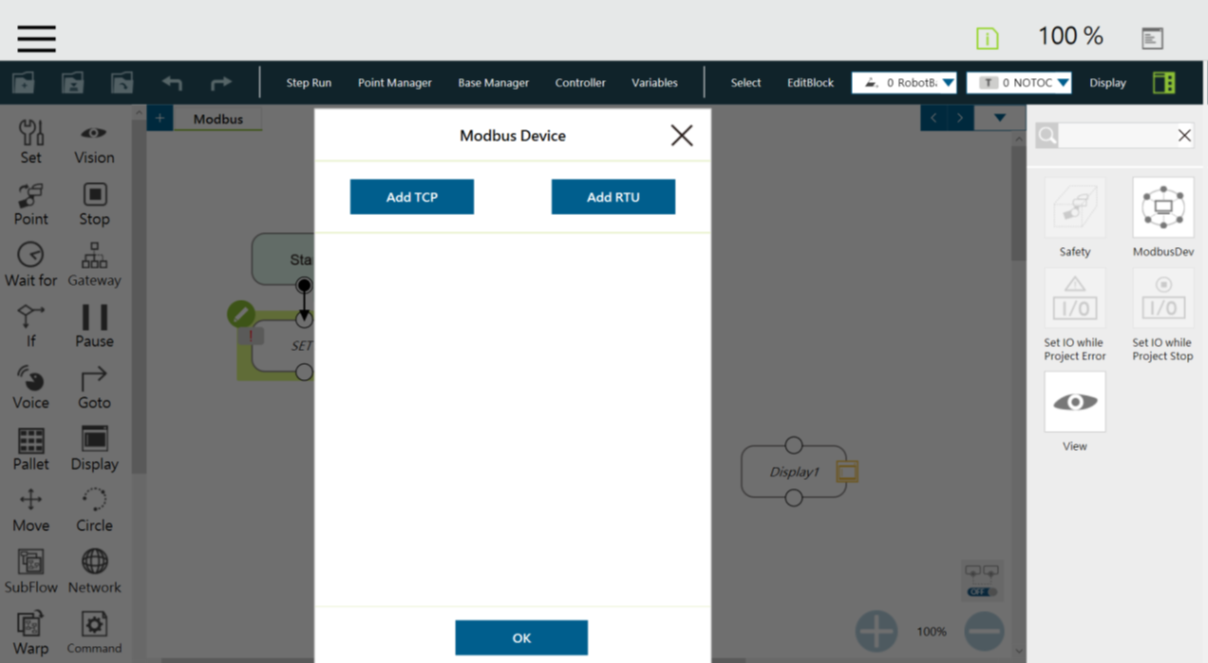
After adding a TCP device, the user can set the parameters of the TCP device such as:
- Input a device name,
- Modbus address, port number, and slave ID,
- Press the OK button to save the parameters.
Users can click the edit (pencil icon on the left) icon of the Modbus list to edit the TCP’s device setting.
Modbus RTU architecture #
Modbus RTU communicates via serial port. The setting interface can check the status, baud rate, port number, slave id, etc.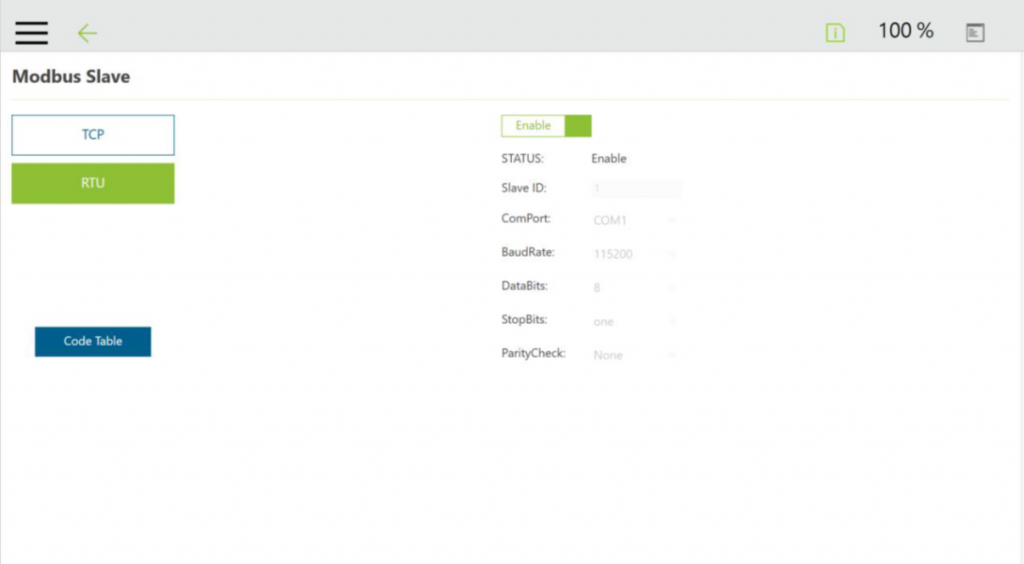
Simple Read Values Example by Modbus register #
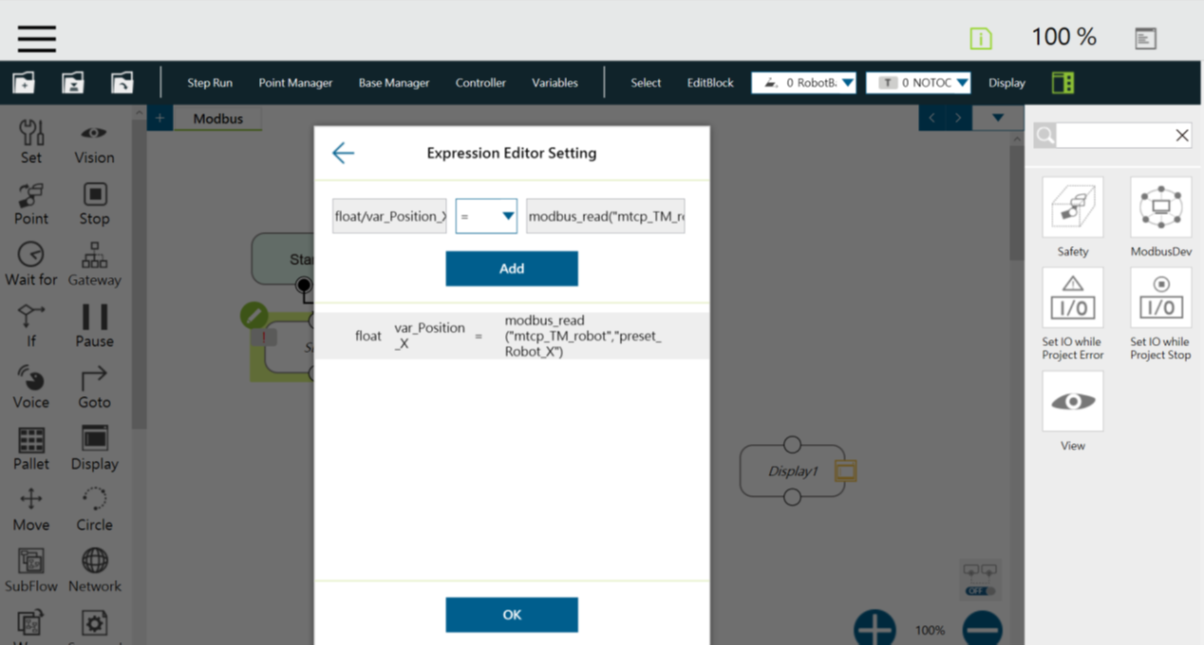
The following example will show how to access the X Coordinate of the TM robot when editing flow. Users must create a variable for storing the X coordinate value of the register.
Create a ‘Set’ node and click on the right side block and select ‘Modbus’, users can select different function such as modbus_read(), modbus_read_string(), modbus_read_int16(), etc.
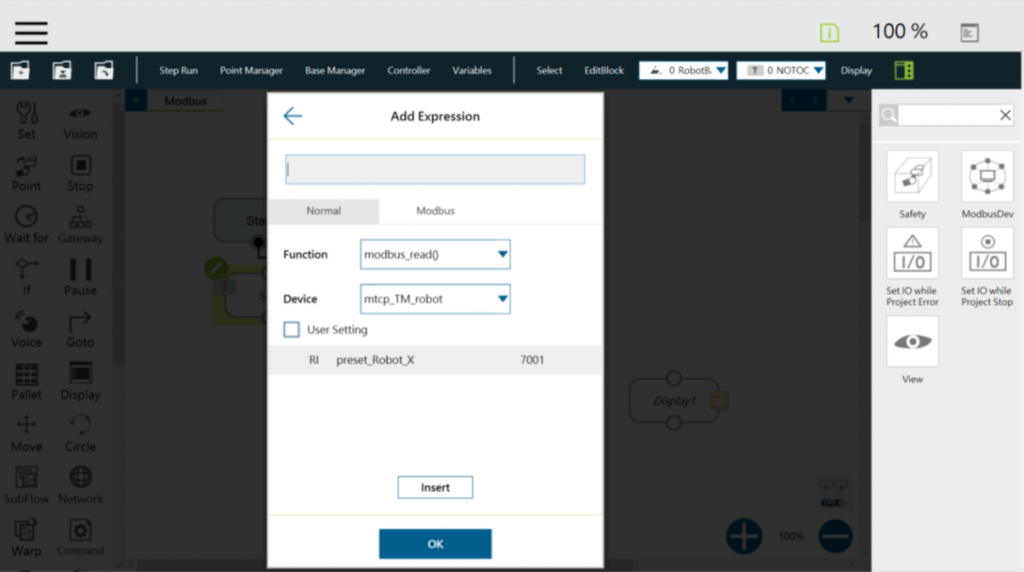
After setting the parameters, click ‘OK’ to jump back to Expression Editor Setting and ‘Add’ one expression to the ‘Set’ node.