此文章之範例適用於下列條件:
TMflow 軟體版本: 所有帶有Force Control Node功能的版本。
TM 手臂硬體版本:所有版本皆適用。
其他特殊軟硬體需求: 需要力感測器。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
背景資訊 #
本文將示範使用Force Control Node來輔助插件應用的一個例子。在此例中,我們使用力感測器來偵測插入時來自不同方向的阻力,然後Force Control Node將根據偵測到的力來調整機器人的姿態。如果用戶在執行機器人插件至底部時遇到困難,可以嘗試此方法。
請注意,使用Force Control Node需要有支援TM的力感測器。
參數設定 #
| 1. 請將Force Control Node拖曳至專案中,並點擊節點上的鉛筆圖標進行編輯。 | 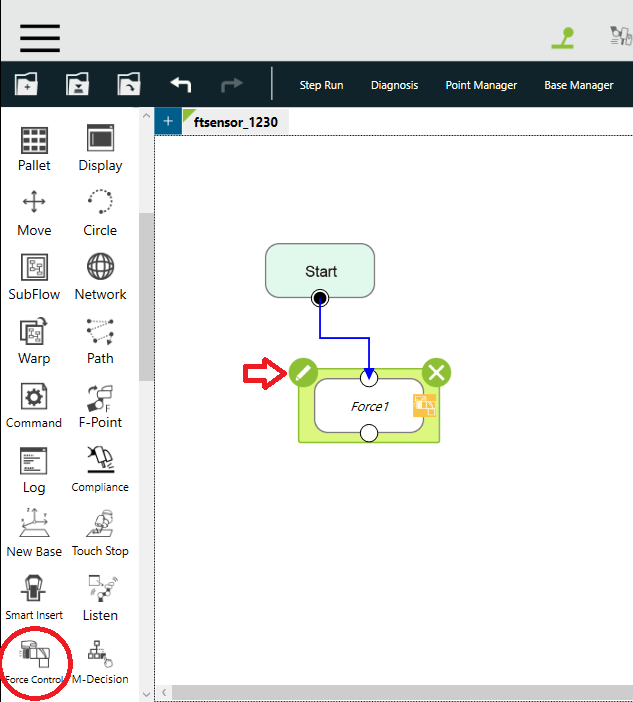 |
| 2. (A)在列表中選擇力感測器。如果您尚未新增感測器,也可以選擇新增。 | 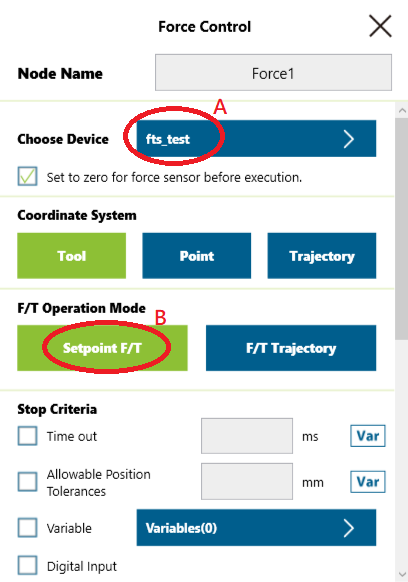 |
| 3. (B)在此範例中,我們使用”點位” 的參考坐標系。要設定更多參數,請點擊按鈕。 | |
| 4. (C)點擊Fz的勾選框將讓機器人在檢測到Fz力時調整移動。Fx、Fy、Tx、Ty和Tz也是如此。使用者可以組合不同的 | 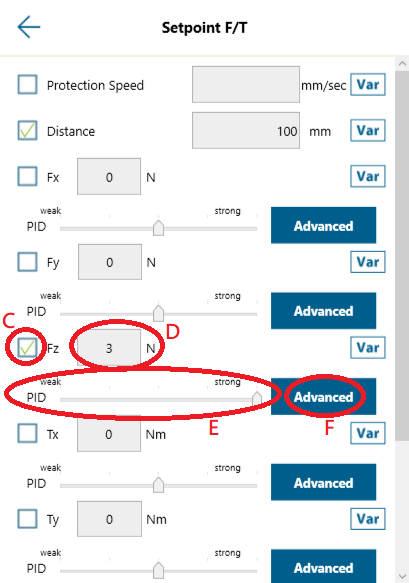 |
| 5. (D)在輸入框輸入數字,將給予機器人指定方向的初始力。 | |
| 6. (E)將拖動條向左調整,力控過程的反應強度會更大。相反地,如果滾動條向右調整,力控過程的反應強度會更小。 | |
| 7. (F)使用者可以點擊進階按鈕自行設定PID,但如果在此修改Kp,滾動條(強/弱)的值將被忽略。請確保每次都在小範圍內測試設定,因為不當的設定可能會導致機器人過度反應,從而造成潛在的碰撞。 | 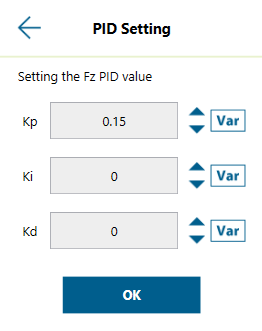 |
參數調整影片說明:
| 步驟5 | |
| 步驟6.1 向左拖動 | |
| 步驟6.2 向右拖動 |
測試結果 #
使用的工具是直徑為7毫米的圓柱,要插入的孔的直徑為8毫米。Force Control Node的設定如下。
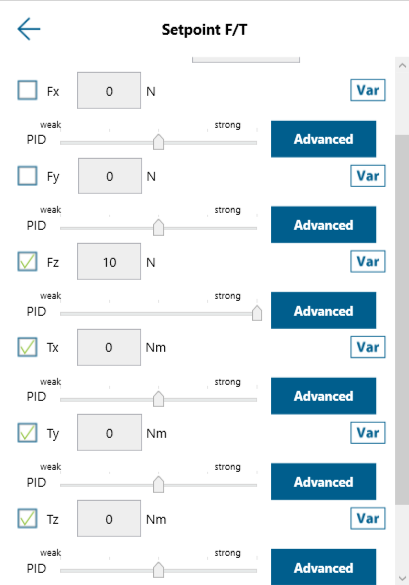
我檢查了Fz、Tx、Ty和Tz,因為我預期插件動作將會面臨來自這些方向的阻力,使用者可以根據您的情況進行調整。
在Rx方向有5度的偏移,Force Control Node會幫助機器人將圓柱插入孔中。
如果偏移角度較高,使用者可以嘗試調整不同的參數組合。
更多範例: #
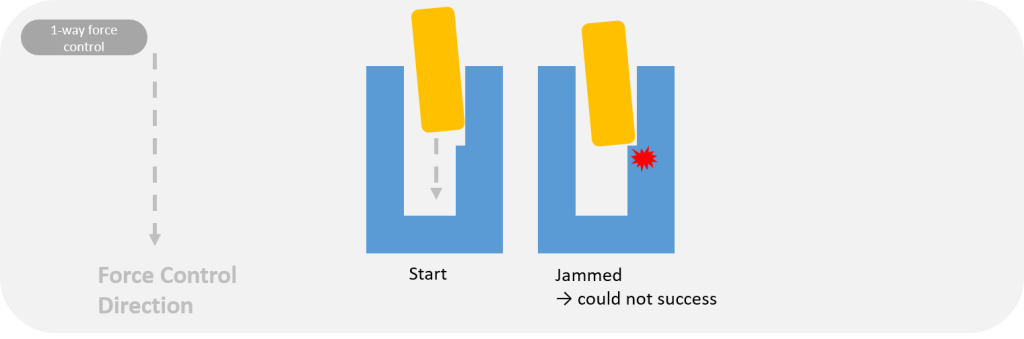
在某些特殊情況下,物體可能會被卡住。
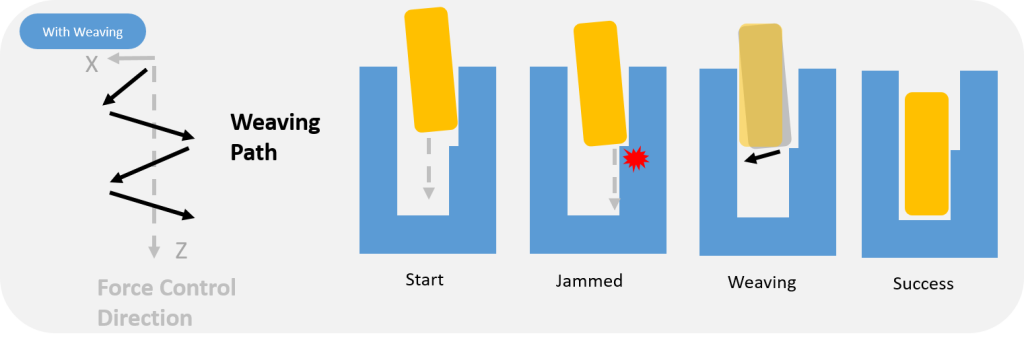
為了克服這個問題,可以在F/T軌跡模式的路徑中添加編織,以創建X方向的編織甚至X-Y方向的編織。
| 1. 選擇F/T軌跡 | 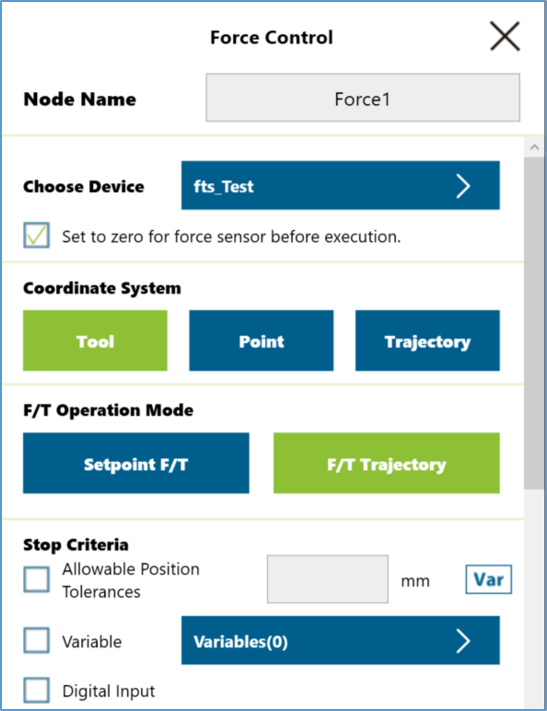 |
| 2. 設定參數 | 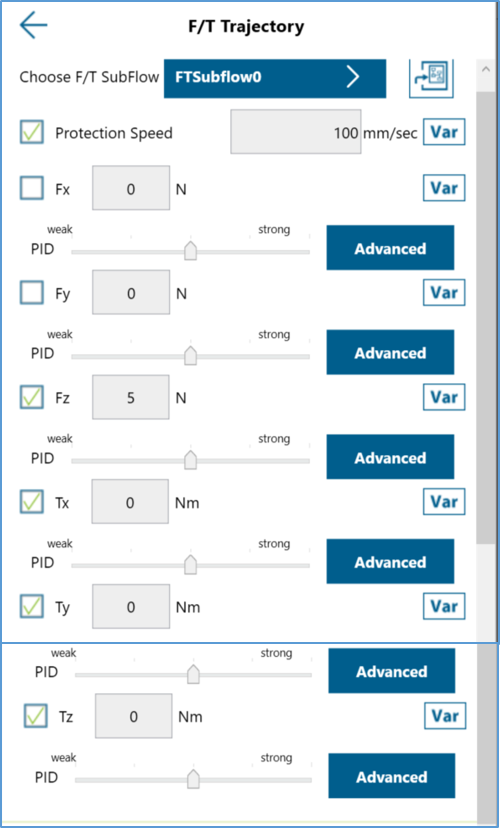 |
| 3. 創建一個F/T子流程並編程 | 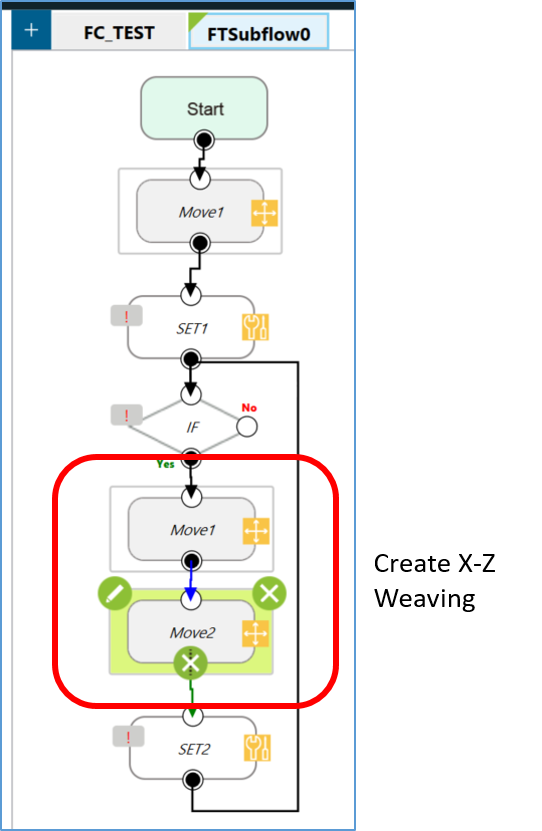 |
結果可以在下面的影片中看到:
1. 如果沒有應用力控制,物體在開始時會被卡住。
2. X方向擺動的空運行
3. X方向擺動的實際操作


