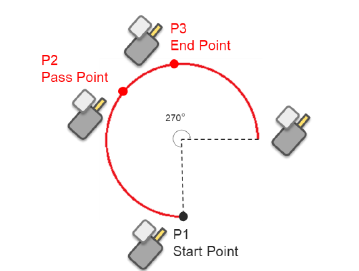
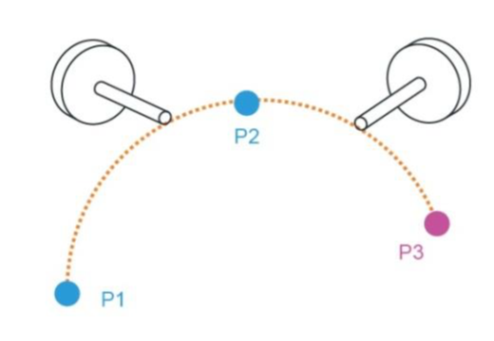
The Circle node plans the path pass through point P2 (pass point) and endpoint P3, and uses P1 (current position) as the path start point, and plans an arc movement.
Setting #
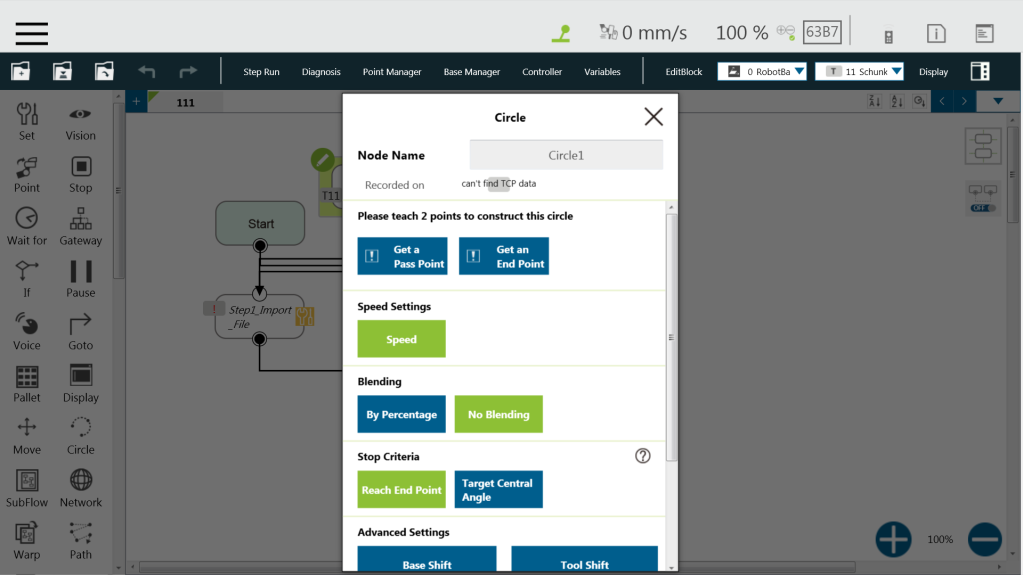
To use the circle node:
Step #1: Create a starting point before adding the circle node.
Step #2: In the circle node, set the Pass Point and the End Point.
Step #3: Define path arc length with angle.
Step #4: Configure the Speed Setting.
Reach End Point #
In the 3-point setting circle, users can define the path arch length, and the robot will move from P1 Start Point to P3 End Point through P2. Select Keep Rotation to make the robot move and not change its pose along the trajectory. On the contrary, select Linear Interpolation to make the robot move and change its pose along the trajectory as shown below.
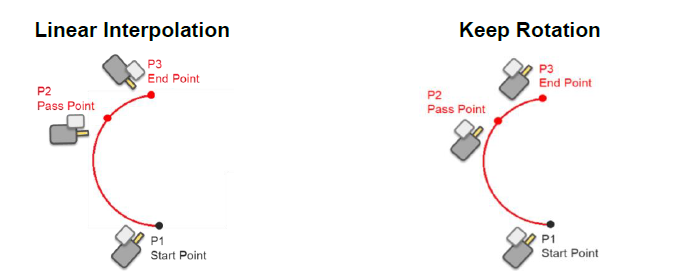 The Circle Motion Status of Reach End Point Setting
The Circle Motion Status of Reach End Point Setting
Target Central Angle #
Define the path arc with angle and the 3-point setting circle to make the robot move along the arc with the target central angle. The angle can be a variable in integer. Along the trajectory, the robot pose will not change after P1.