Installation Procedures #
- Download the TM Plug & Play Software Package compression files on the official website
- Rename the USB storage device ”TMROBOT”. Make sure the drive format is NTFS.
- Place the zipped component files in the USB with the folder directory TMROBOT:\TM_Export\TMComponent\ComponentObject\component_zipped_file
- Insert the USB storage device to the robot controller.
- The import process can refer to the article.
Assigning Gripper Button by using Customized Component #
 #
#
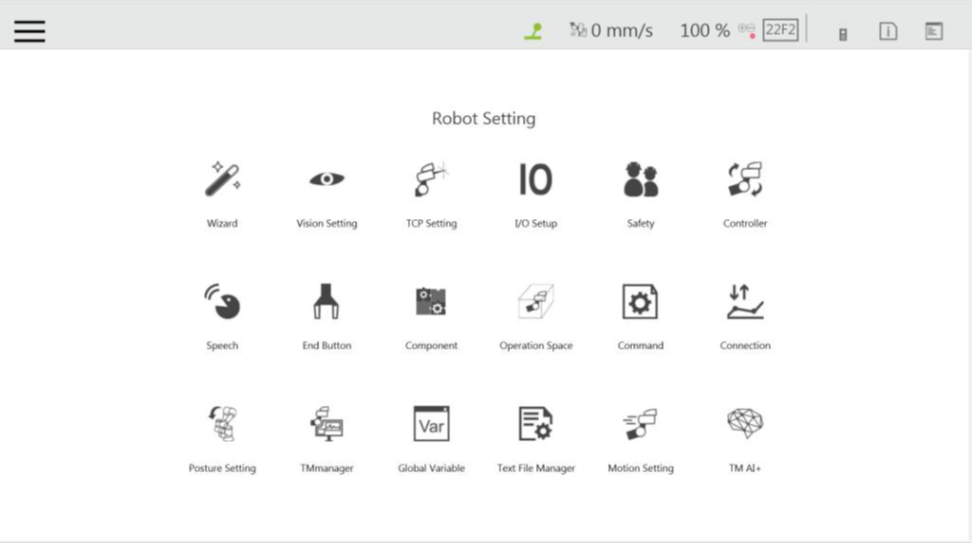
Step #1: From the TMflow homepage, click the icon ![]() and select the Setting icon.
and select the Setting icon.
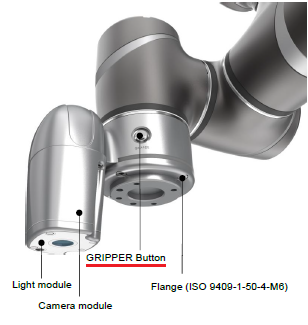
Step #2: Click on Gripper Button![]() .
.
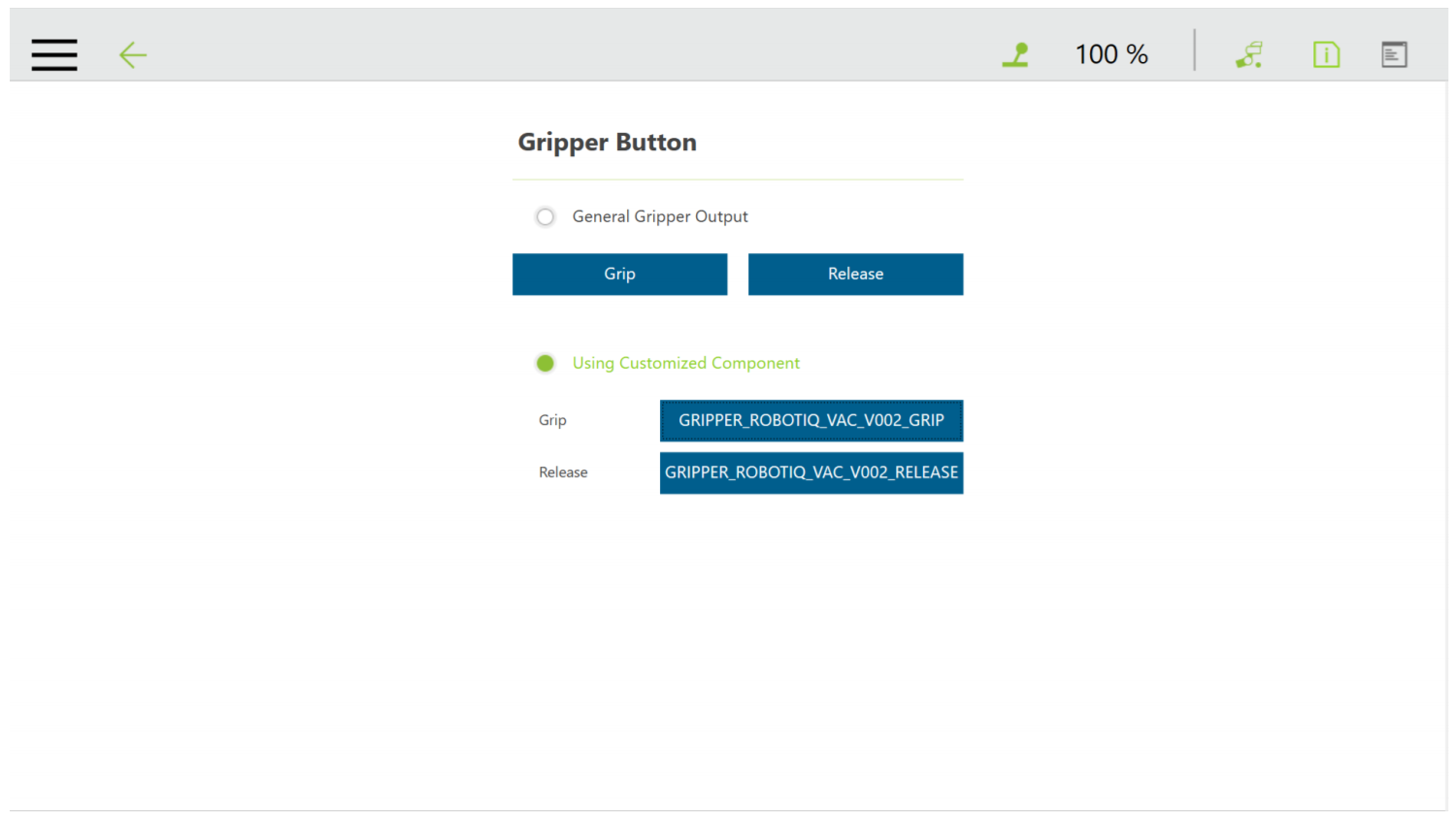
Step #3: In the GripperButtonwindow, tick the Using Customized Component radio button and select the Component you want to assign to either one of the Gripper actions (Grip / Release).
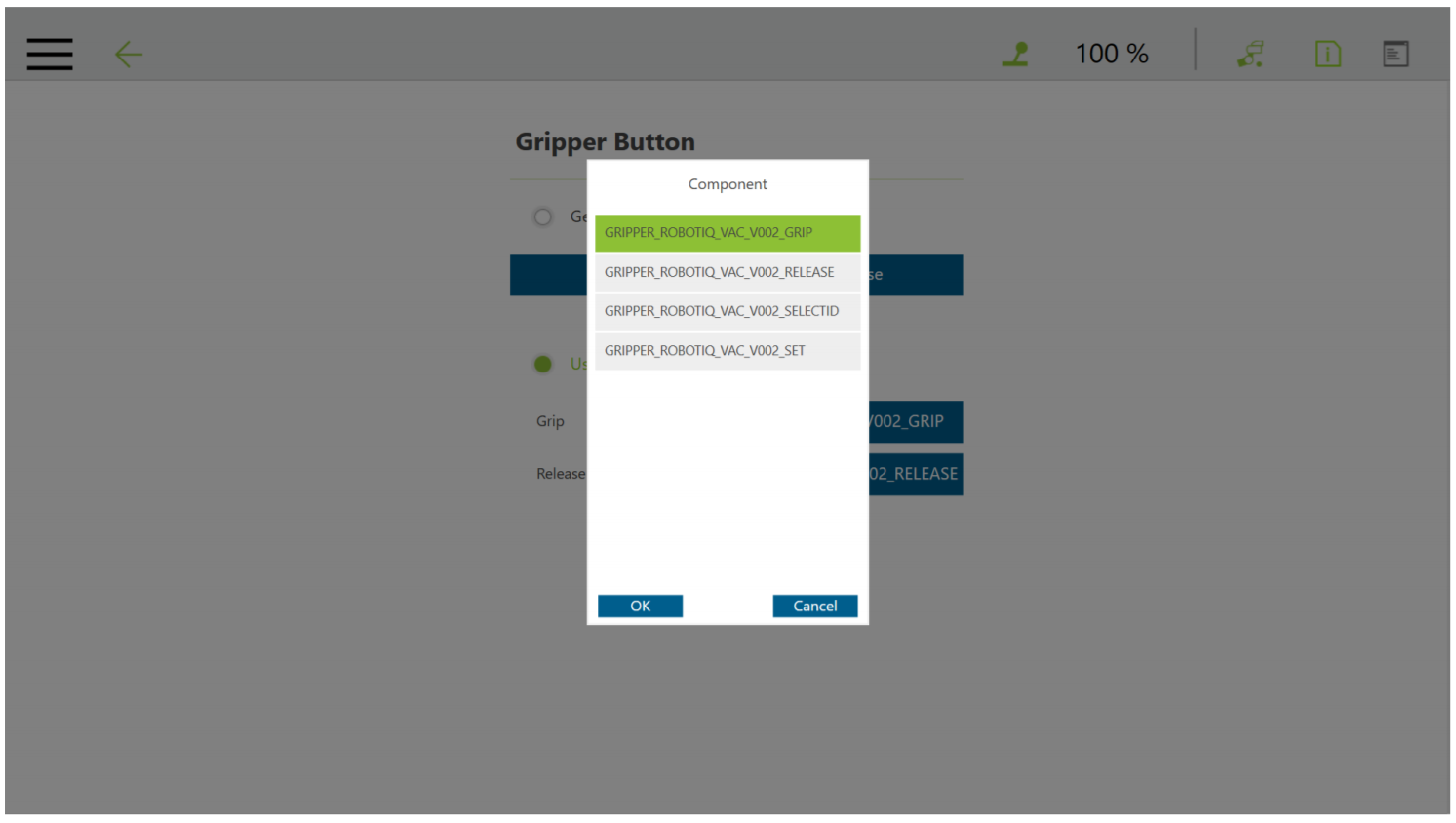
Step #4: In the pop-up window, select or change the Component you wish to assign to the Gripper action/button and click OK.