Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本: 1.76.6300 或以上。
TM 手臂硬體版本:所有版本皆適用。
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
使用時機 #
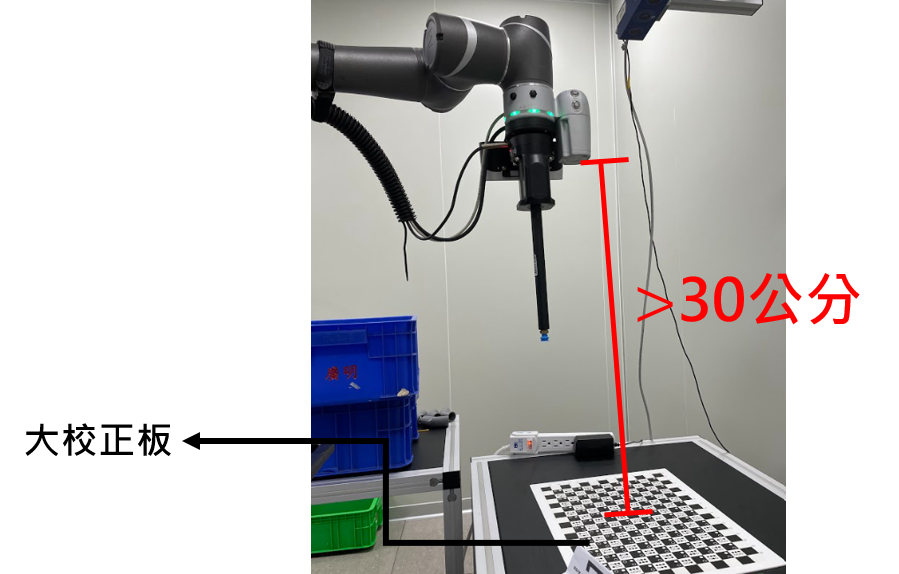
- 操作定點式時,需要建立工作平面,所需要工具有大及小的校正版,若是工作平面與相機高度超過30公分,解析度低的情況,會導致兩個校正版皆辨識不清,無法校正出準確的工作平面。
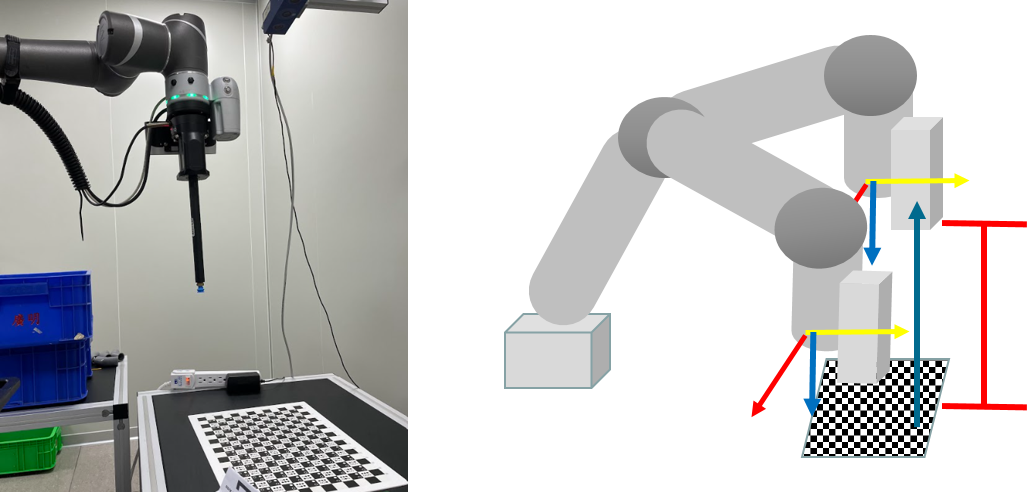
- 物件校正僅適用於眼在手,為利用手臂伺服式定位移動中的差量,計算目標物體與手臂的相對關係, 不需要建立工作平面。
- 校正之特徵物件有較明確的輪廓,且盡量不具對稱性,較能精準定位。
無法建立工作平面情形 #
- 工作距離大於30公分
- 若是將相機解析度設定為1280×920,解析度較低
- 找不到校正版上所有點位,如下影片->透過物件校正解決問題
傾斜校正 #
- 環境設定 :
- 工作距離較長,如同校正工作平面,會看不到校正版
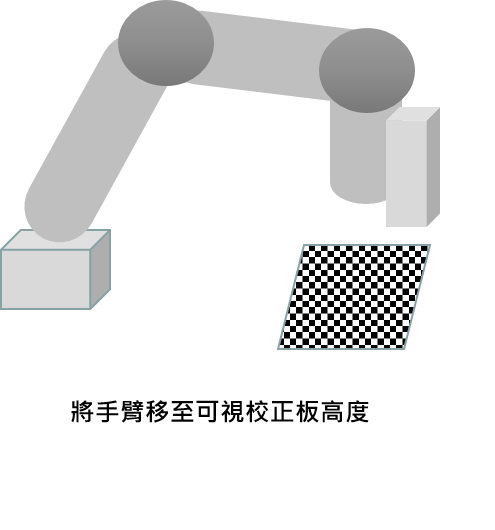
- 移動至可視校正板距離
- 建立Vision Job
- 選擇眼在手的TM Robot 2D 攝影機

- 選擇眼在手的TM Robot 2D 攝影機
- 選擇攝影機工具箱
- 設定相機參數及選擇適合的焦段

-
- 點擊傾斜校正
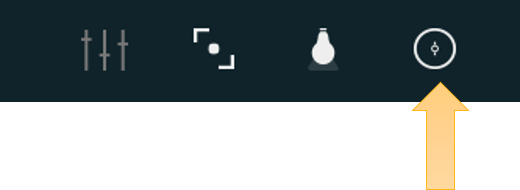
- 進入傾斜校正畫面
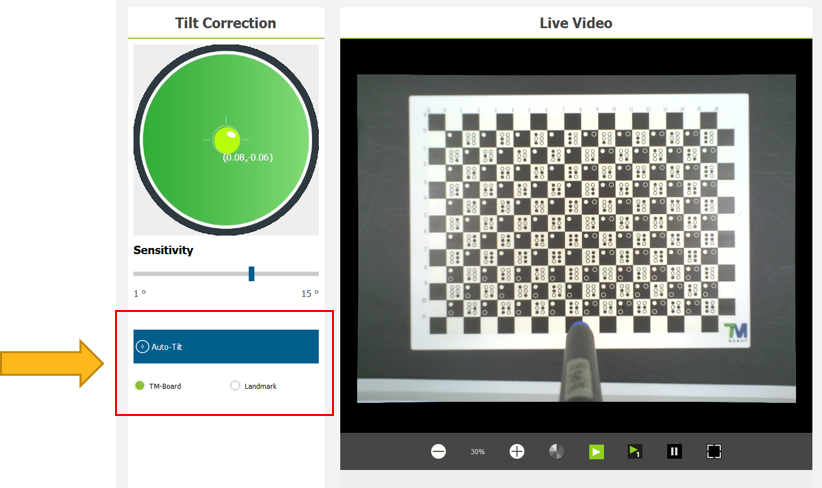
- 確保相機與工作平面平行
- 以提供之校正版進行傾斜校正
- 選擇TM-Board,點擊Auto-Tilt
- 點擊傾斜校正
- 抬升手臂至工作距離
- 透過工具座標系沿Z軸方向移動至工作距離
- 透過工具座標系沿Z軸方向移動至工作距離
編輯視覺流程 #
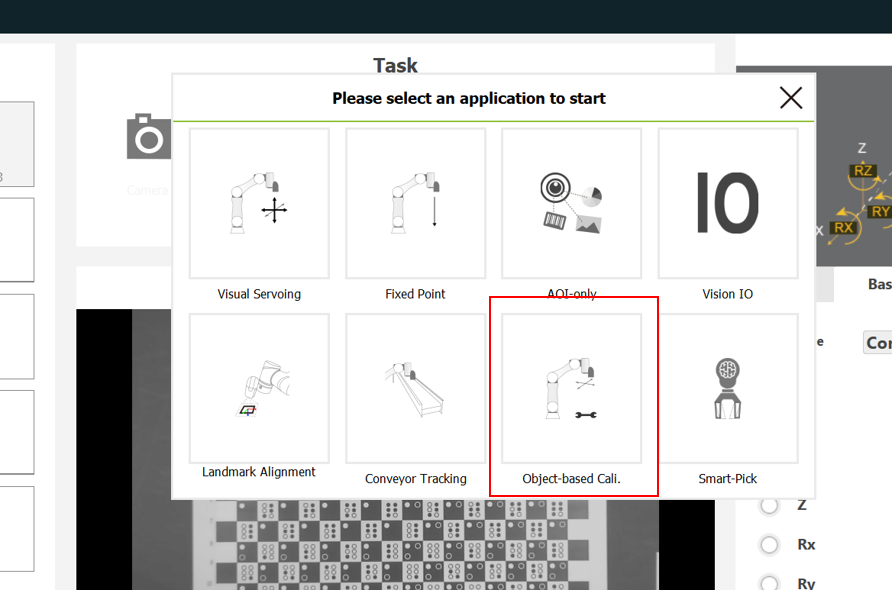
- 選擇物件校正
- 點擊進入視覺流程編輯
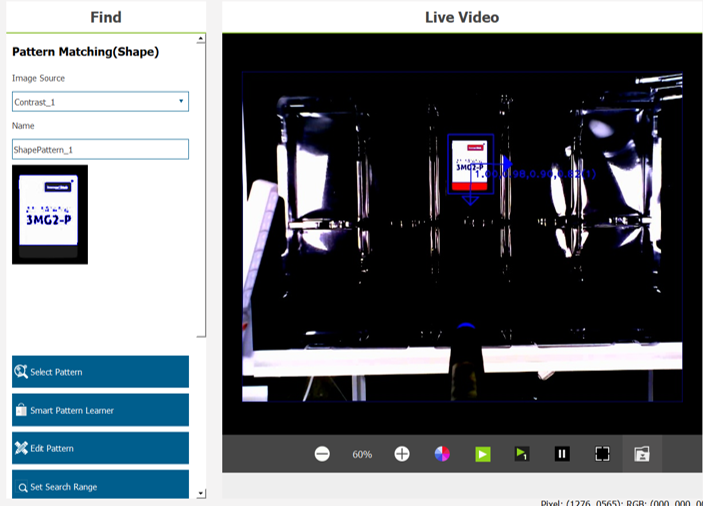
- Pattern matching(shape)
- 選擇Find->選擇Pattern matching(shape)

-
- 將特徵明顯物件與目標物件至於同一高度之工作平面
- 建議特徵明顯物件以輪廓較明顯的物件進行比對,其所取特徵具有方向性
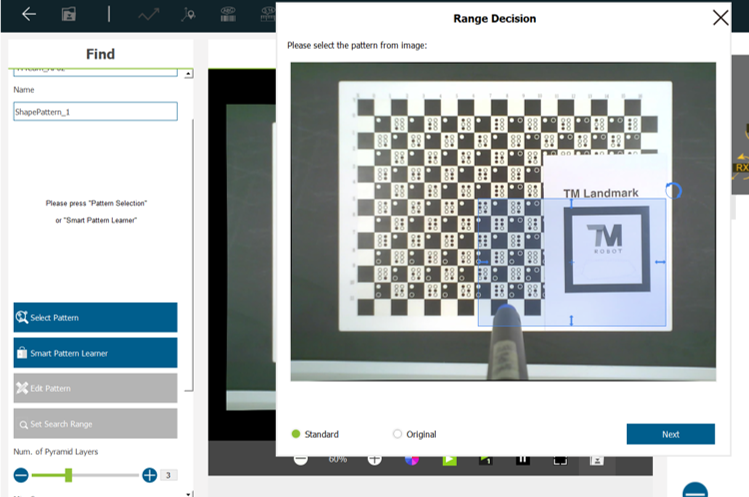
- 此以放大一倍之TM Landmark作為特徵明顯物件示範
-
- 抓取TM Landmark 外圍特徵,以及內部字樣,確保其有方向性
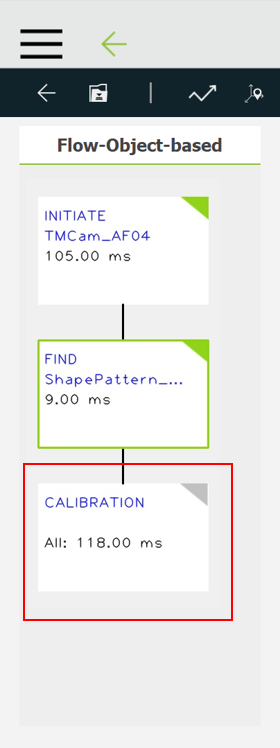
- Calibration
- 編輯Find結束->選擇Calibration進行編輯
-
- 選擇適當的移動範圍
- 若是移動範圍限制太小,可能會出現‵‵Over the servoing limit”警告標語
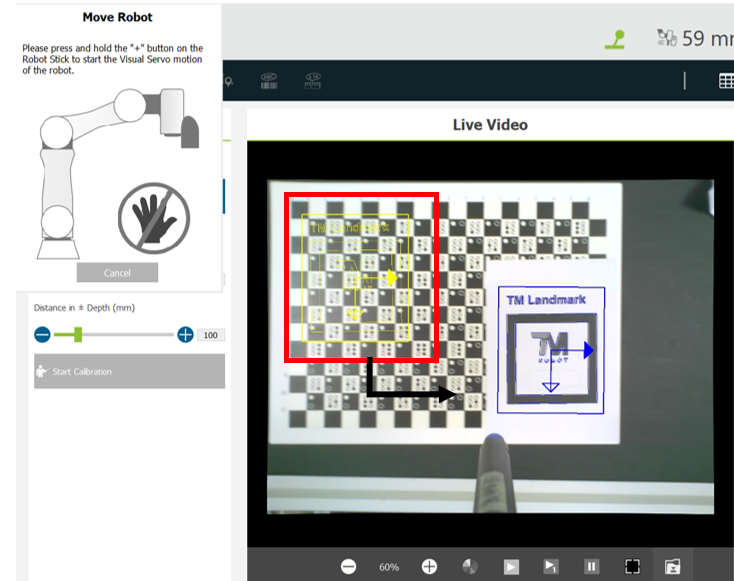
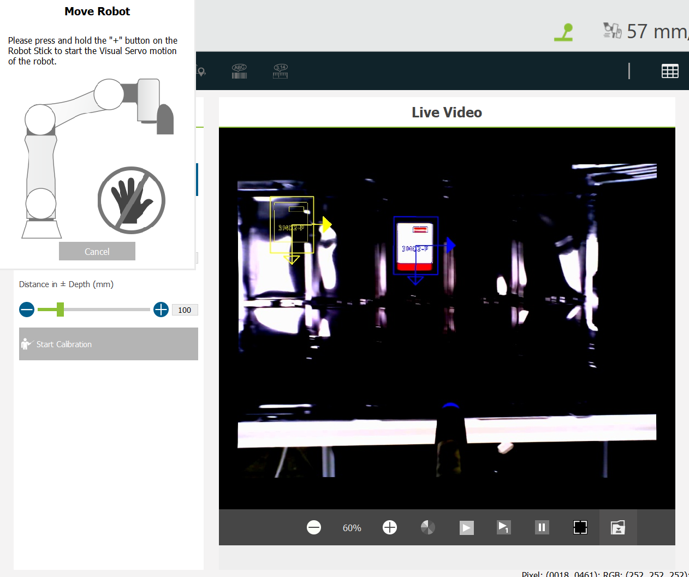
- 設定完參數,先講手臂移置初始位置->選擇開始校正
- 校正時手臂會走到五個位置進行校正
- 持續壓住操作器上‵‵+”,為安全模式,確保移動過程中,未觸碰到其他障礙物->直到校正結束
- 如圖所示,若是特徵比對不明顯,容易導致黃色取樣比對實物不準確,需要回到Find進行調整
- 取得物件base
- 編輯視覺完成後,執行視覺流程,便能取得物件相對於手臂的robot base,也就是目標物件的工作平面
- 接著再回到Find,比對目標物件,且針對目標物件進行流程編輯
執行問題處理 #
-
- 問題 :
- 若是在Calibration,手臂伺服物件過程中, 持續比對不到物件特徵,會出現如圖的提示
- 問題 :

-
- 解決方式 :
- 確認比對特徵是否過於複雜,回到pattern matching中,將比對的pattern不易比對的特徵刪除
- 透過Enhance模組處理,使欲比對特徵更鮮明,容易尋找
- 在Find中,將分數設定的低一些,如果Pattern具對稱,將尋找Pattern的角度給與限制
- 解決方式 :
實際應用範例-紙箱 #
- 實驗內容 :
- 以箱子為例,箱子上方印有TM字樣,透過TM字樣進行物件校正,接著編輯流程,透過吸嘴將箱體吸取
- 實驗工具 :
- 印有TM字樣之箱子

- Epick一隻

- 印有TM字樣之箱子
- 工作平面
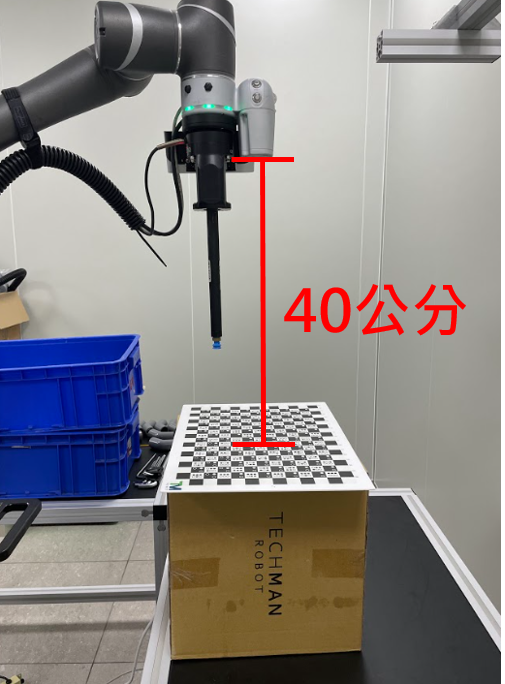
- 確定相機與紙箱距離
- 相機與紙箱的距離約為40公分
- 若是以定點式,將無法校正出工作平面
- 透過物件校正取得紙箱的位置
- 視覺流程編輯
- 進入攝影機工具箱
- 調整相機參數及焦段
- 放置校正版進行傾斜校正
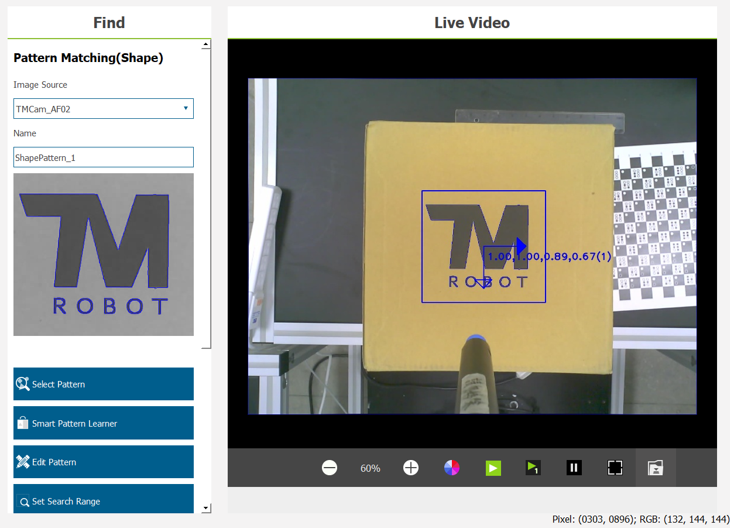
- 選擇Pattern matching(shape)
- 取樣箱子中間TM字樣及輪廓
- 進入攝影機工具箱
-
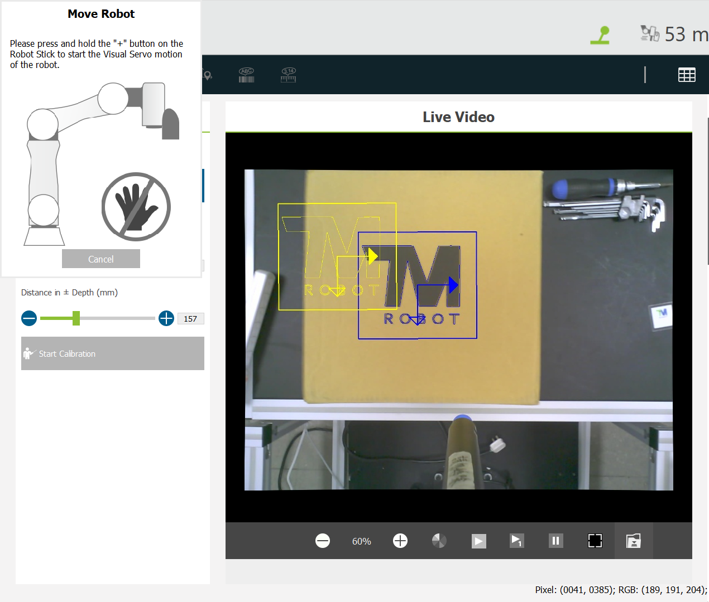
- 進行Calibration
- 調整移動範圍
- 開始校正
- 進行Calibration
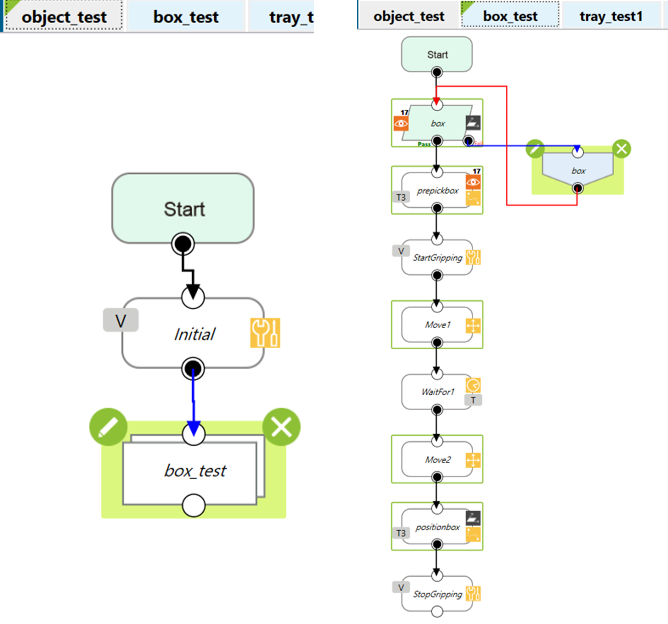
- 流程編輯
- 透過vision取得紙箱位置
- 教導取物點,加入吸嘴吸取物件
- 實驗成果
- 找到紙箱位置,成功走至物件中心
- 透過吸嘴將紙箱吸取
- 示範影片
實際應用範例-SSD #
- 實驗內容 :
- tray盤擺放SSD,取SSD上方字樣及輪廓進行物件校正,以吸嘴將SSD從tray盤上取出
- 實驗工具 :
- SSD

- Epick一隻
- SSD
- 工作平面
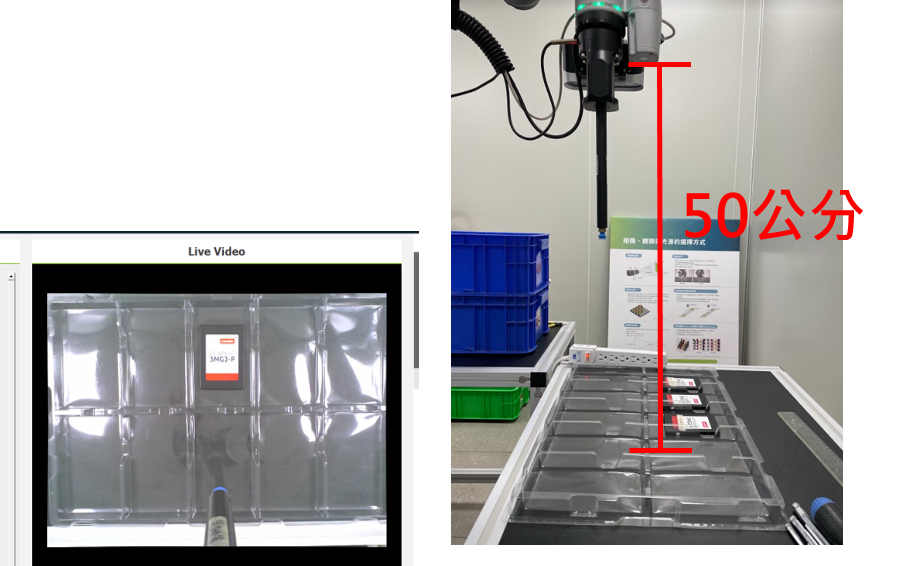
- 確定SSD工作平面
- 為了照到整個tray盤,相機與tray盤的距離約為50公分
- 若是以定點式,將無法校正出工作平面
- 透過物件校正取得SSD的位置
- 視覺流程編輯
- 進入攝影機工具
- 調整相機參數及焦段
- 放置校正版進行傾斜校正
- 使用Enhance,提升辨識效果
- 選擇Pattern matching(shape)取樣SSD中間字樣及輪廓
- 進入攝影機工具
- 進行Calibration
- 調整移動範圍
- 開始校正
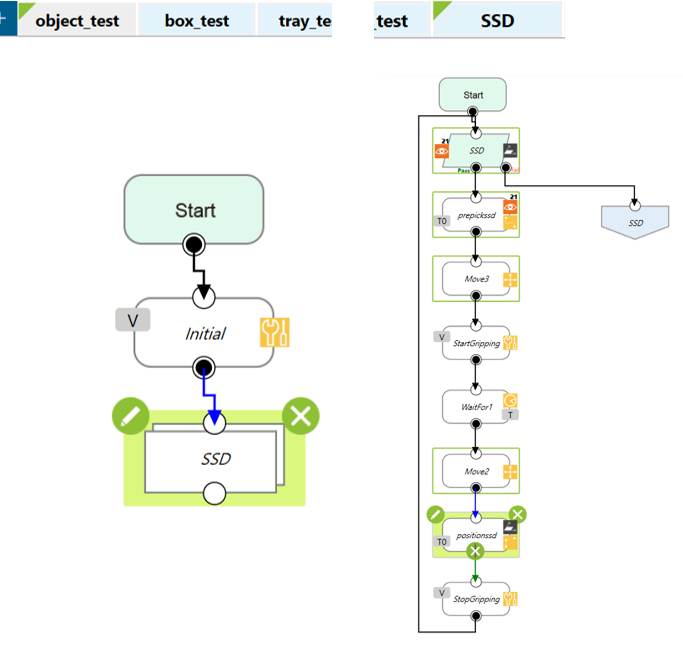
- 流程編輯
- 透過vision取得SSD位置
- 教導取物點,加入吸嘴吸取物件
- 實驗成果
- 找到SSD位置,成功走至物件中心
- 透過吸嘴將盤中料件,一一取出至盤外
- 示範影片


