Term Definitions #
Tools shift
- The robot can run on the same path using a different tool.
- The robot can complete the same path if a tool is worn out or it uses a different tool.
- Tools shift is divided into Keep Pose and Keep Path.
Base shift
- When the robot is on a different base, it can run on the same relative path.
Tools shift: Keep Pose #
If a tool selected when the robot records a path is incorrect or if the tool is not applied, Keep Pose of Tool Shift can be used to substitute the correct tool parameters of a node. This setting will not cause changes to the robot’s pose and position; that is, the tool overlaps with the original path when a project is underway.
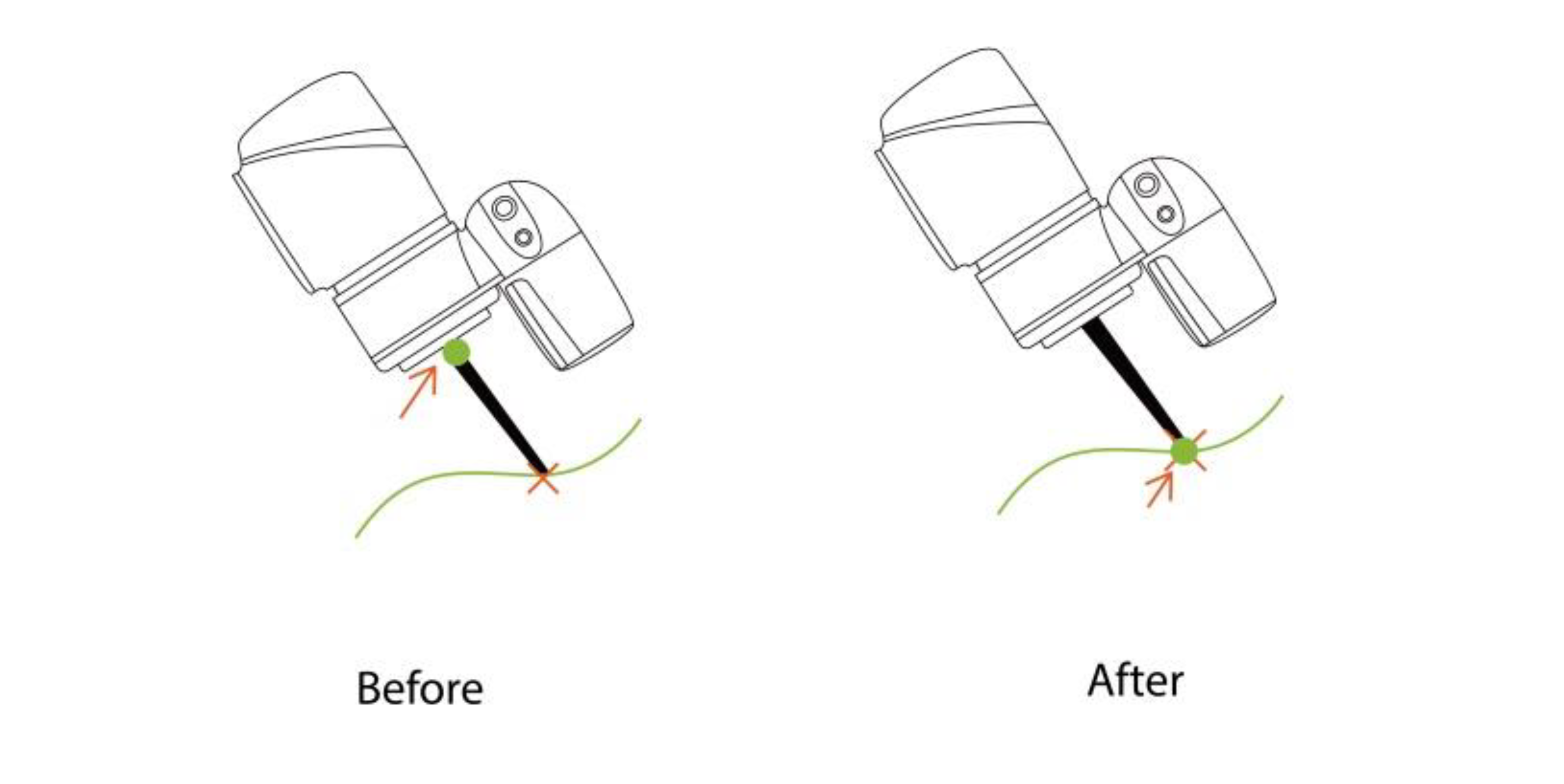
The figure above shows the robot moving the same way it did earlier.
The robot will align the points in the new tool base with those in the old one to change its pose in line with the settings of the point recorded for the new tool. However, this may not work as a result of spatial constraints or the robot’s mechanical limitations.
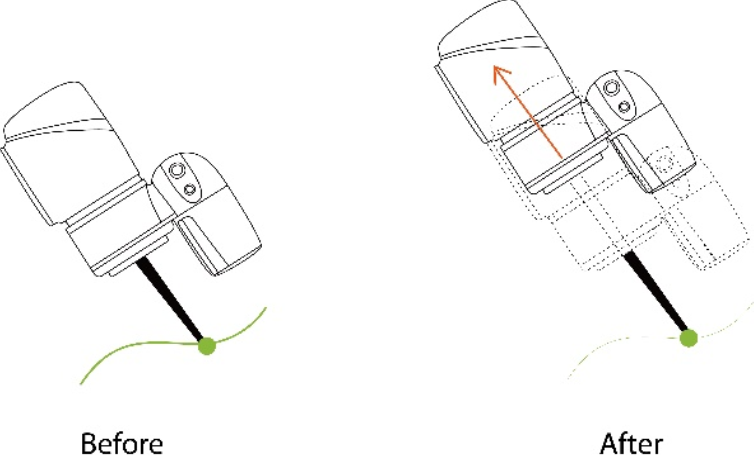
The figure above shows the TCP aligned with the original path.
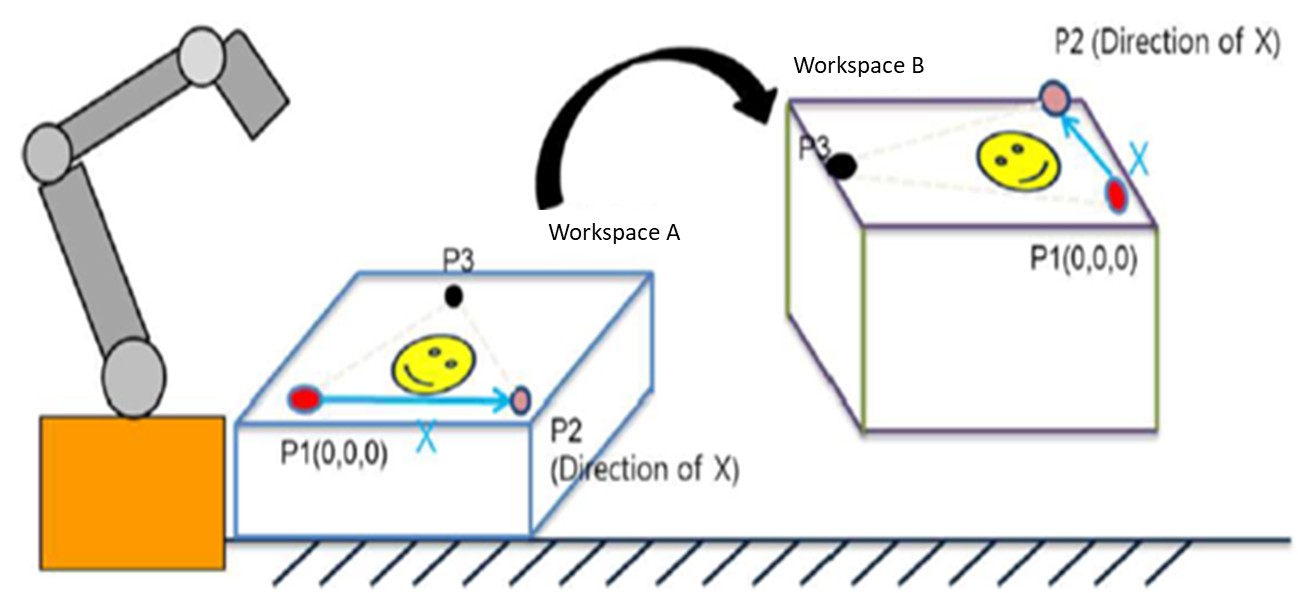
How and When to Use Base Shift #
Purpose: To shift a point to a different base without changing the point’s position and direction in relation to the base, and retain a relative position when the absolute position is changed.
A job completed in different workspaces.