Table of Contents
This article is applicable under the following conditions:
TMflow version: 1.76.6300 or later
TM Robot hardware version: All
Other software/hardware requirements: N/A
Please note that, depending on the TMflow version, the user interface and the operation procedure may differ.
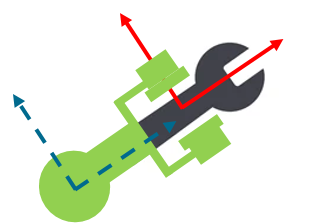
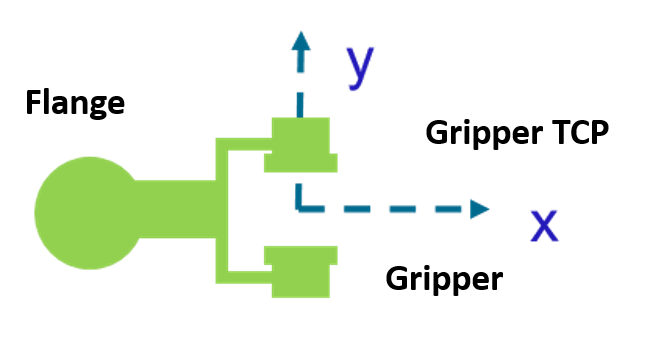
What is the Tool Central Point (TCP)? #

TCP(Tool Central Point)
- When a robot is manipulated to a specific point within a space, it essentially means moving the TCP toward that point.
- A robot can have several TCPs, but it can only handle one at a time.
How to Calibrate a TCP? #
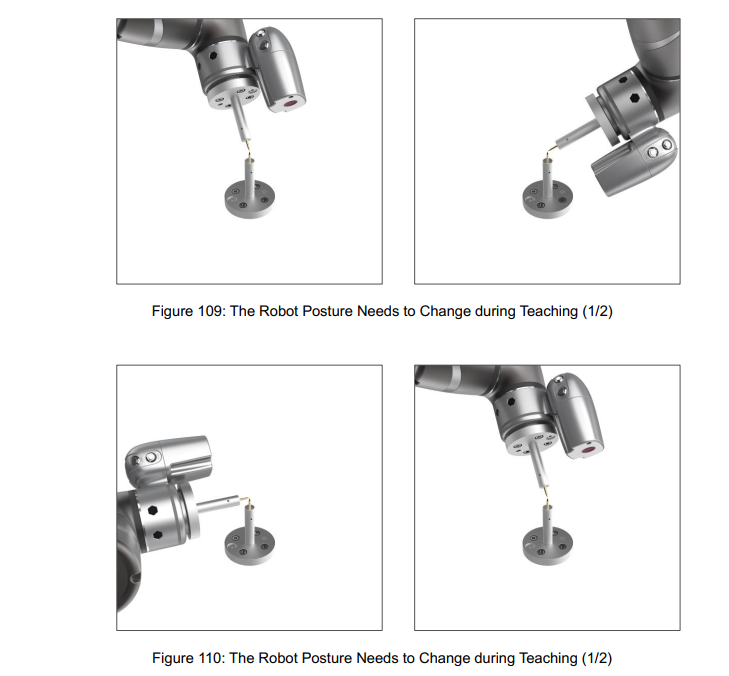
Tips
- Calibrated the TCP to ≤ 0.3 to ensure accuracy.
- Rotate J6 at as many different angles as possible during TCP calibration.
- If possible, keep the calibration tip away from the extension axis of the center of the flange.
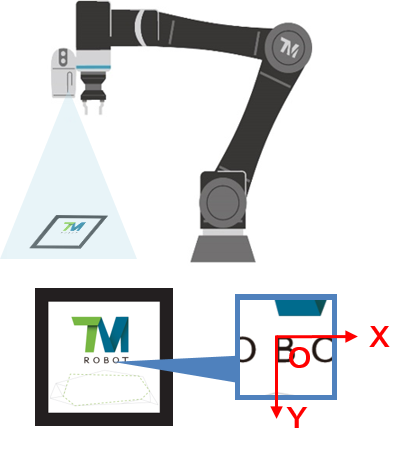
Create a Vision Base #
Fixed Landmark
- The original point of a vision base is the center of the Landmark (specifically, the upper-left corner of the letter “B”).
Fixed positioning
- The original point of a vision base is the center of an object that is determined in the Find module for a vision job, and it can be changed by moving the Anchor.
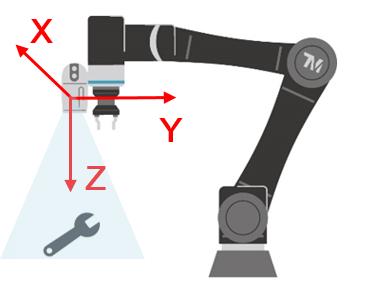
Servoing
- Through servoing, a position within the field of EIH camera is set as the original point of the vision base, and the axes of the camera are the same as those of the TCP HandCamera.
Pair a Vision Base with a TCP #
- Calibrate a TCP
- Create a vision positioning task (e.g., fixed positioning with the Landmark)
- Select a vision base and a TCP

- Move the robot to (0,0,0), and the calibration tip will arrive at the Landmark center.
- Move the robot to (20,0, -5), and the calibration tip will arrive 5 mm above the edge of the right side of the Landmark center

TCP: HandCamera #
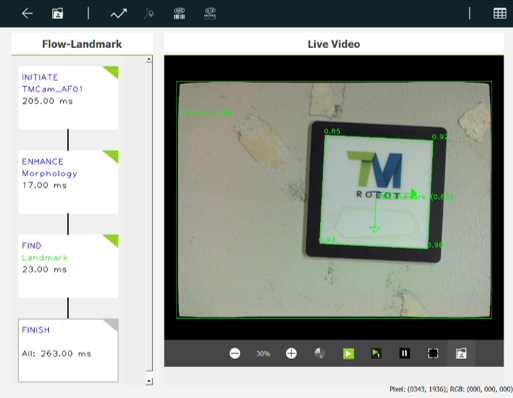
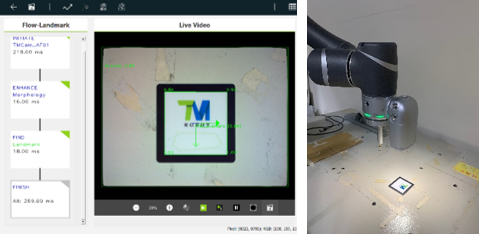
When you use an EIH camera-equipped robot, you can find a TCP named “HandCamera” in the TMflow task-editing page. This TCP describes the relation between the original point of the EIH camera coordinates and the flange. It can be applied in Landmark positioning:
- Rough positioning: Detect the Landmark at a distance to ensure it appears in the field of view and so create the first vision base.

- Set the TCP: Set HandCamera as the TCP and move it to (0,0,-150), which is where the first vison base is located

- Precise positioning: Create a second vision base. Then the Landmark will appear in the field of view and stay 150 mm away from the camera. This can yield more accurate positioning results
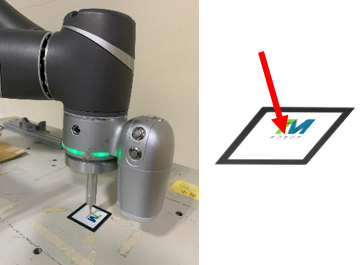
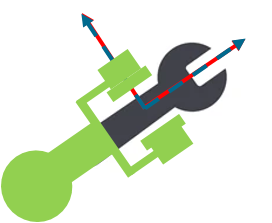
Set the TCP before Rotating the Object #
When there is a need to rotate the object, it is necessary to set the TCP.
- Create a vision base for your workpiece.
- Set the TCP.
- Set where to pick up the object.
- Align the original point of the gripper with that of the vision base.
- If you don’t set the TCP, the flange remains at a certain distance and angle from the vision base.