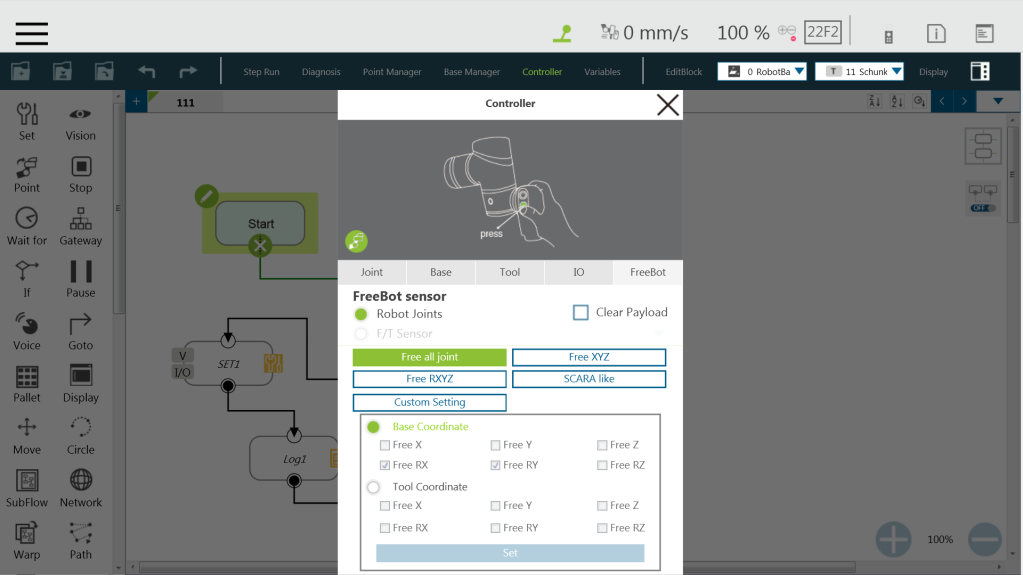
In FreeBot, it defaults to Robot Joints as the Control Mode, and the movement limits of the robot while pressing the FREE Button can be set. The settings are divided into:
- Free all joints: Freely drag the robot while pressing the FREE Button.
- Free X, Y, Z: Use the FREE Button to make the robot performing translation-only motion in Robot Base.
- Free RX, RY, RZ: Use the FREE Button to make the robot performing rotation-only motion in Robot Base.
- SCARA like (X, Y, Z & RZ): Use the FREE Button to make the robot performing motion on X, Y, Z, RZ directions of Robot Base as the traditional SCARA robots. This mode is suitable for teaching simple pick and place jobs to avoid accidentally causing unnecessary rotation in degrees of freedom when teaching.
- Custom Setting: Freely set the degree of freedom to be released and fixed, to facilitate hand guiding. Once set the selection, it prompts an error message window if there is no box checked in Base Coordinate or Toor Coordinate.
When the control mode is Robot Joints, Check Clear Payload and press the FREE Button to clear payload for obtaining the correct TCP force and joint torque.