流程 #
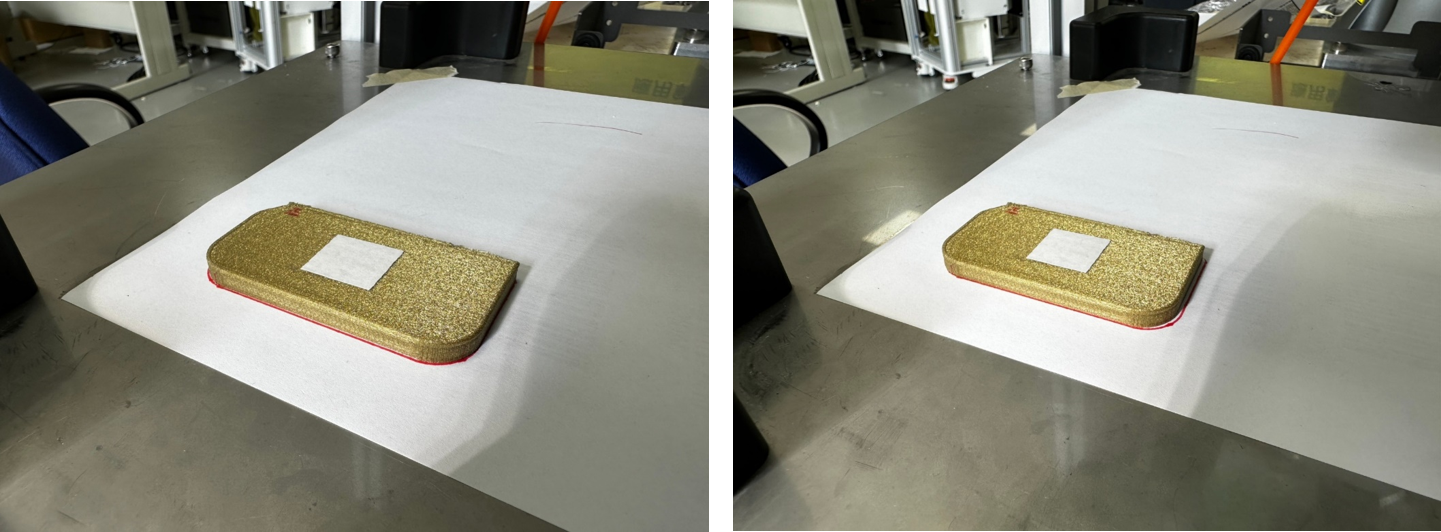
- 把工件放在目標位置
- 吸取工件,去做一次下視覺(V1)
- 移回目標位置,並以V1記下此點位P1
- 把工件移回起始點
- 吸取工件,再去做一次下視覺(V2)
- 將P1從V1 tool shift(保持路徑)至V2
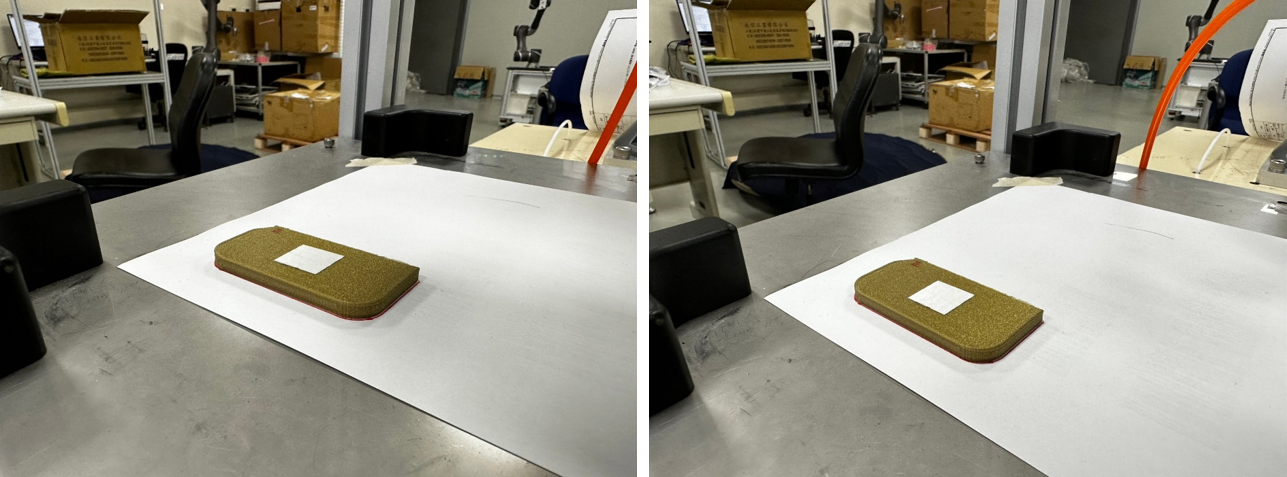
偏差展示 #
流程:
- 把工件放在目標位置
- 吸取工件,去做一次下視覺(V1)
- 移回目標位置,並以V1記下此點位P1
- 把工件移回起始點
- 吸取工件,再去做一次下視覺(V2)
- 將P1從V1 tool shift(保持路徑)至V2
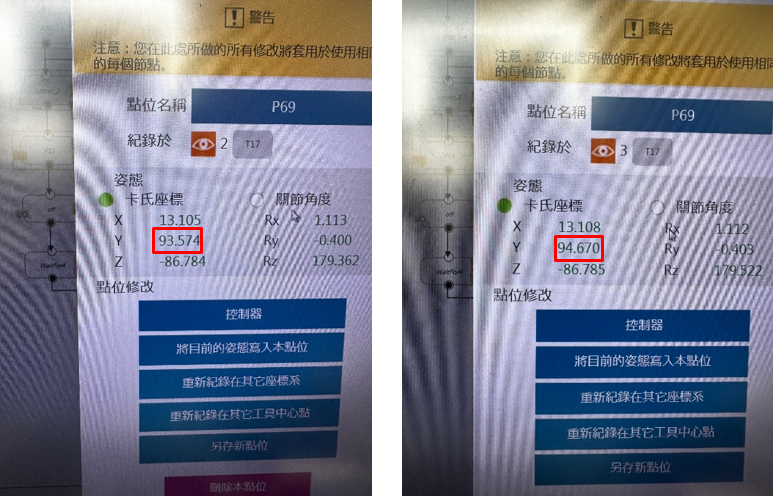
偏差約1.1mm
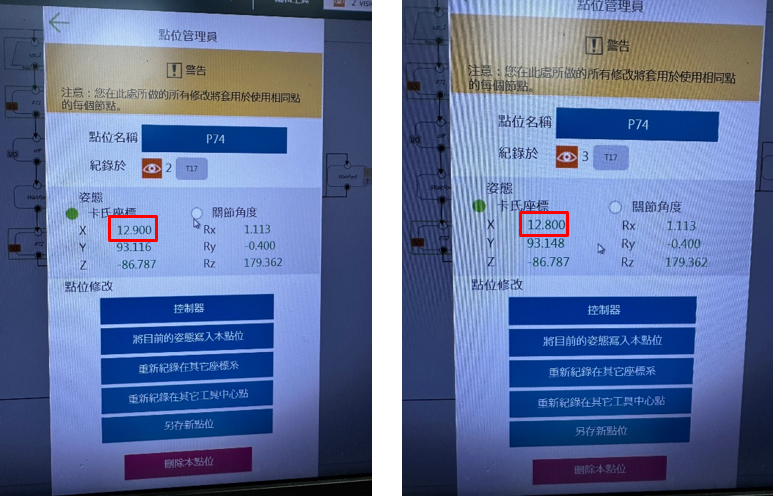
TCP檢測
下視覺產生之TCP,繞工具z軸旋轉時,沒有依錨點為中心旋轉
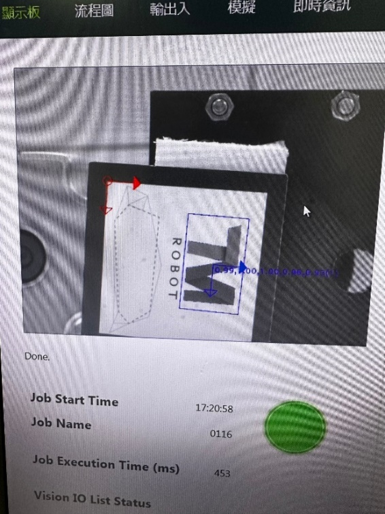
下視覺任務 #
流程:
- 把工件放在目標位置
- 吸取工件,去做一次下視覺(V1)
- 移回目標位置,並以V1記下此點位P1
- 把工件移回起始點
- 吸取工件,再去做一次下視覺(V2)
- 將P1從V1 tool shift(保持路徑)至V2
兩次下視覺必須是建立在同一個視覺任務,以確保特徵、錨點一致,這樣才可以確保tool shift之後,補償的點才會是正確的。
缺點 : 兩次吸取工件位置雖不用精確教點,但是要確保兩次都能在框選的ROI裡面,不能偏差太大。
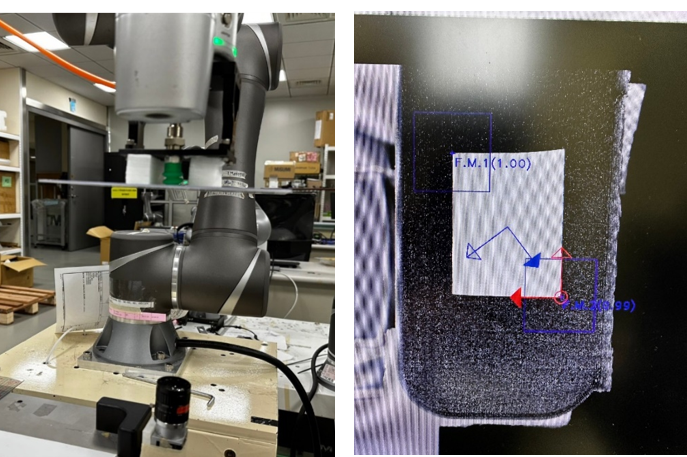
改善結果 #
流程:
- 把工件放在目標位置
- 吸取工件,去做一次下視覺(V1)
- 移回目標位置,並以V1記下此點位P1
- 把工件移回起始點
- 吸取工件,再去做一次下視覺(V2)
- 將P1從V1 tool shift(保持路徑)至V2
偏差優化至0.1mm


