Table of Contents
此文章之範例適用於下列條件:
TMflow 軟體版本: 2.22 或以上。
TM 手臂硬體版本: HW 5.0 或以上
其他特殊軟硬體需求: 無
請注意,新舊版本之差異可能導致操作介面、步驟上會有所差異。
所有版本皆適用
功能目的 #
- 提供將資料即時串流至客戶端的功能
- 提供即時控制機器人的功能
即時遠端伺服器 (RTRS) 功能 #
- 運動控制:位置控制、速度控制
- 輸出控制:類比與數位輸出
- 資料交換:機器人狀態、類比與數位輸入
- 頻率:運動或輸出控制最高可達 500Hz,資料交換頻率 50Hz ~ 500Hz
- 通訊方式:TCP/IP
使用方式 #
1.設定 Real-Time Remote Server (RTRS)
要使用 RTRS, 需要先在 TMflow 介面中設定網路 .
IP& RTRS settings : TMflow –> Configuration –> Remote Control Settings–> RTRS
Port : 5895 (data exchange), 5896 (motion control)
可設定選項 : Enable RTRS、 Enable Motion Command、and IP Settings. 
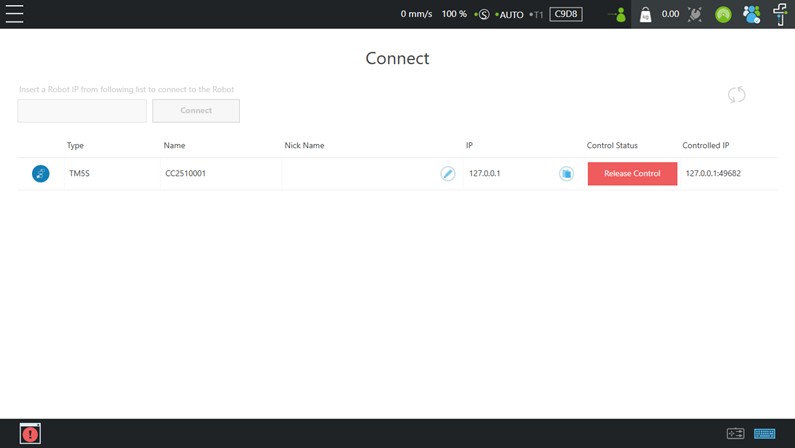
2. 連線與啟動
當 RTRS 生效且啟用 Motion Command 後,機器人將進入 Remote Control Mode
資料交換流程 :
- 啟用 RTRS
- 以 IP 連線至埠號 5895
- 設定串流頻率與資料項目
- Data packet example :
- $TMRTS,8,2,8,50,*58\r\n (Set streaming frequency to 50Hz)
- $TMRTS,17,1,9,Joint_Angle,*2D\r\n (Set Joint_Angle as streaming data)
- 啟動資料串流
- Data packet example:
- $TMRTS,5,2,7,1,*61\r\n (Start data streaming)
- 如果傳送資料或 AO/DO 寫入指令,請下指令
- Data packet example :
- $TMRTS,41,1,1,Ctrl_DO2=1 Ctrl_AO0=1,*D9\r\n (Set value to Ctrl_DO2 and Ctrl_AO0)

機器人控制流程
- 啟用 RTRS 與 Motion Command
- 設定資料交換以獲取機器人狀態
- 以 IP 連線至埠號 5896
- 設定運動控制參數
- Data packet example :
- $TMRTC,18,5,8,S J 150 1 1000,*AF\r\n (Set the motion control to position mode and joint mode, with a time to top speed of 150ms, a gain of 1, and a control interval of 1000ms.)
- 啟動運動控制
- Data packet example :
- $TMRTC,5,8,7,1,*7B\r\n (Start motion control)
- 傳送運動指令
- Data packet example :
- $TMRTC,28,0,1, { 10.8587, -148.9658, 45.7319, 143.9948, 18.7473, 33.8587},*7B\r\n (Set the control target to the following joint angles: J1 at 10.8587°, J2 at -148.9658°, J3 at 45.7319°, J4 at 143.9948°, J5 at 18.7473°, and J6 at 33.8587°)



