TMflow 軟體版本: 2.20或以上之版本皆適用。
TM 手臂硬體版本:HW 3.2或以上之版本皆適用。
注意事項:不同版本的軟體可能會呈現不同結果。
目的 #
- 飛拍功能可讓機器人在移動時進行拍攝,無須停止,有效縮短單次影像檢測的處理時間(cycle time)。
- 飛拍功能整合運動控制、數位訊號輸出、影像擷取。使用者僅需設定拍攝點位、數位 IO 埠及視覺任務,即可快速完成設定。
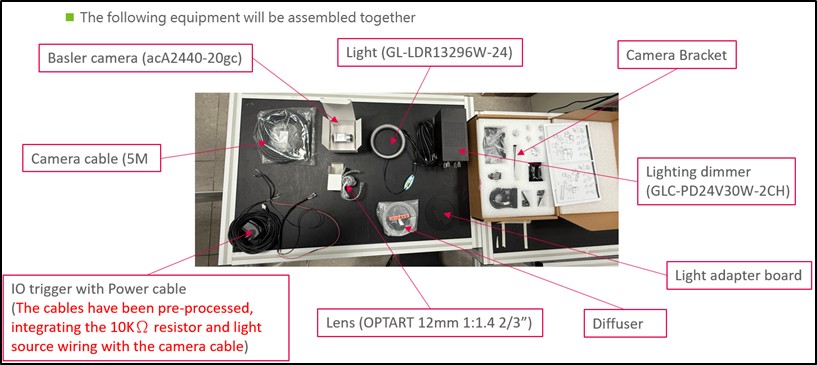
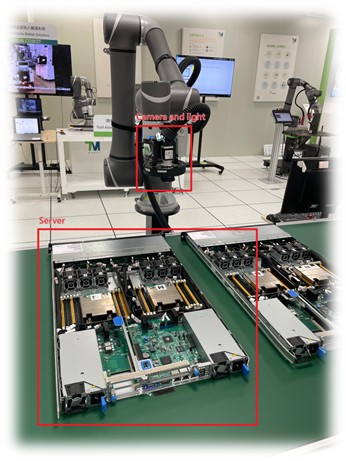
- 本文以伺服器外觀檢測為例,並說明相關的硬體與環境設定。
相機參數設定 #
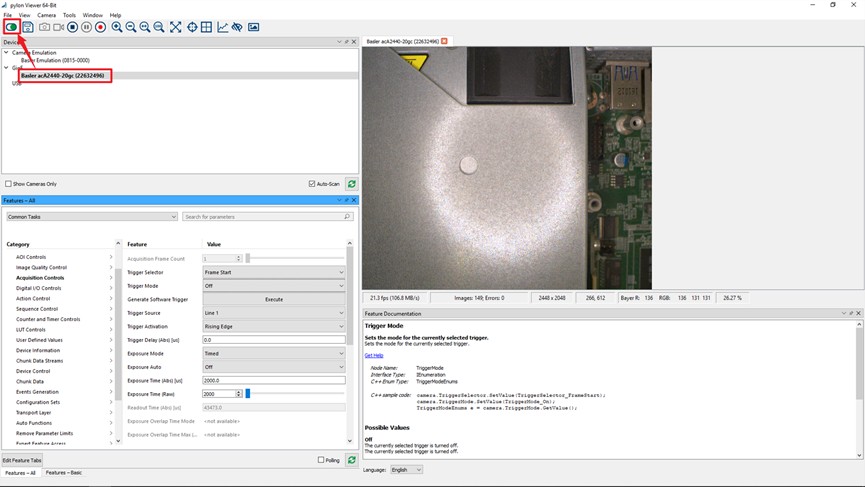
請先將相機連接至電腦並啟動 Pylon。相機安裝與使用說明請參考下列 (pylon Software for Image Capture >> At a Glance | Basler AG (baslerweb.com)).
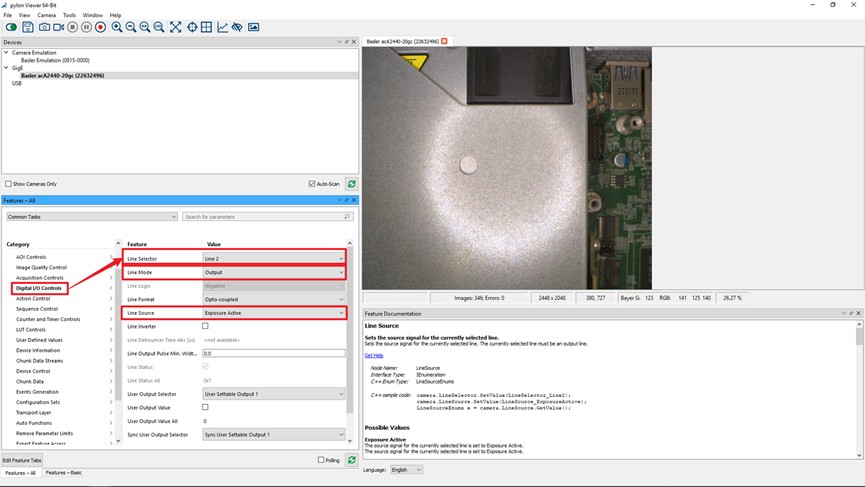
接著,進行光源同步設定。點擊Digital I/O Controls,將 Line Selector 設為 Line 2、Line Mode 設為 Output、Line Source 設為 Exposure Active。
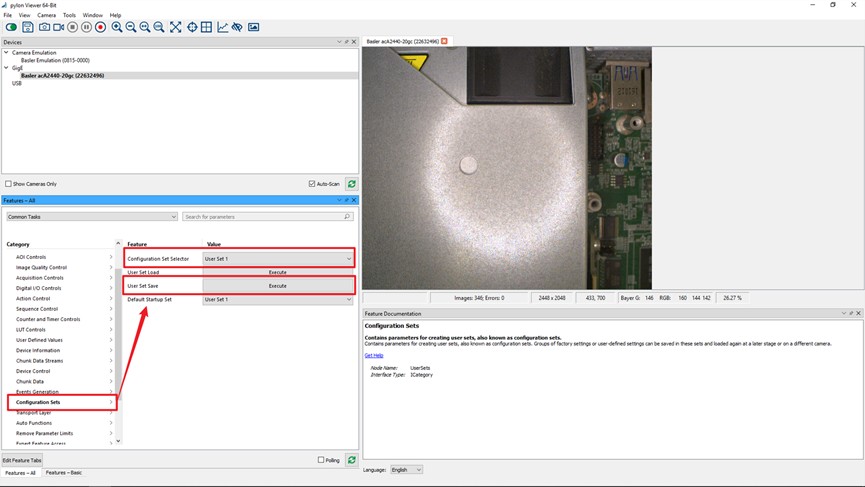
最後,將所有參數儲存至 User Set 1,此設定將儲存在相機內。
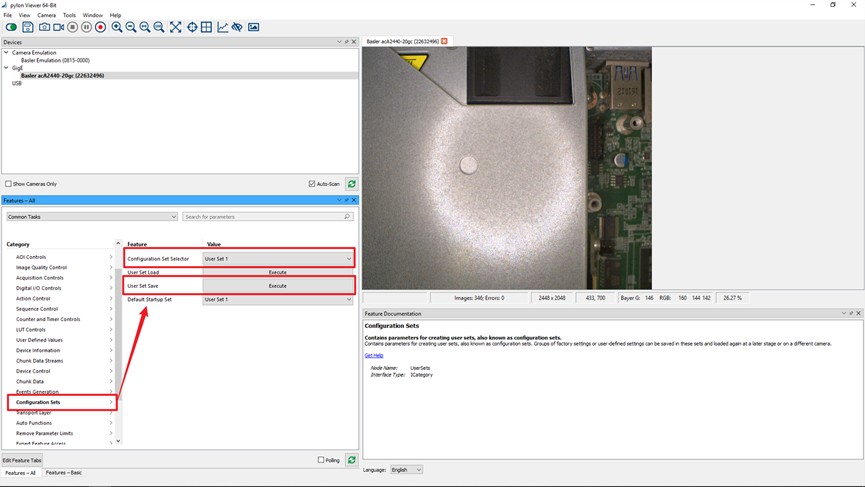
最後,將所有參數儲存至 User Set 1,此設定將儲存在相機內。
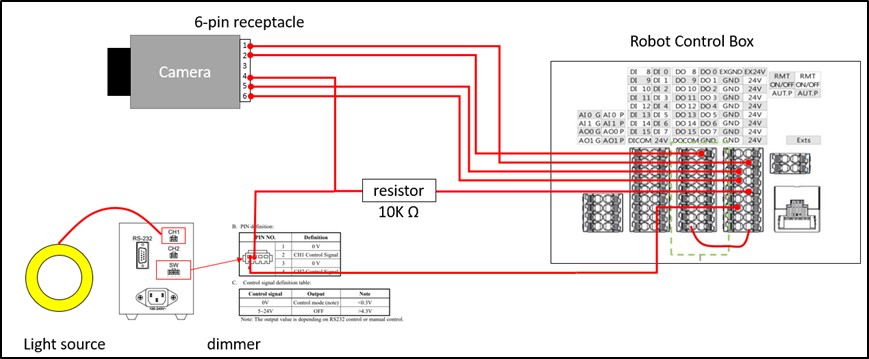
配線 #
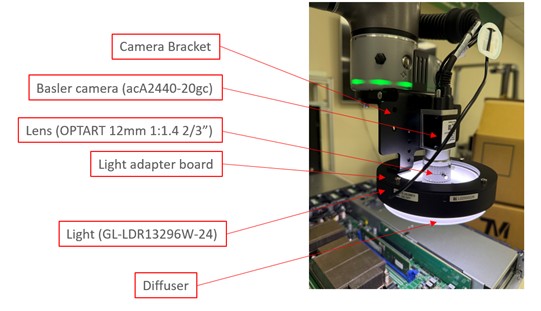
完成相機參數設定後,將相機安裝至機器人,並連接 GigE 網路線與觸發訊號線。

配線示意圖與實際接線方式如下方所示:
TMflow 流程操作 #
建立一個新專案,並根據伺服器上的特徵點進行定位,後續的點位將依此視覺坐標系進行移動與檢測。
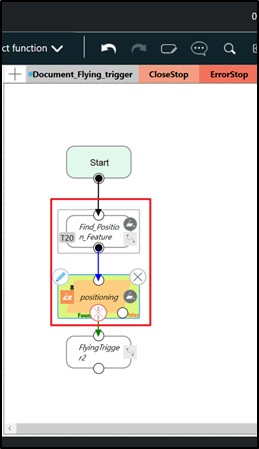
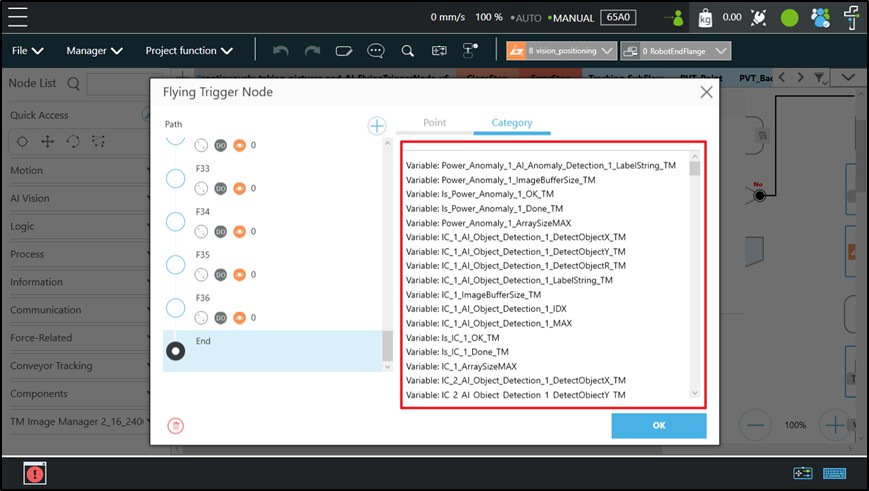
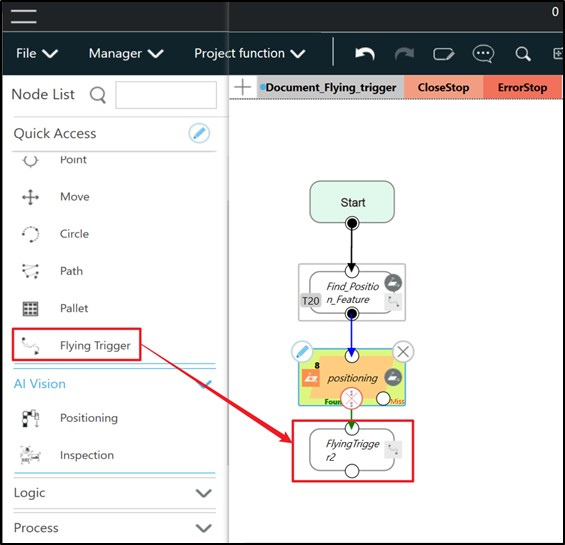
建立並開啟Flying Trigger節點。
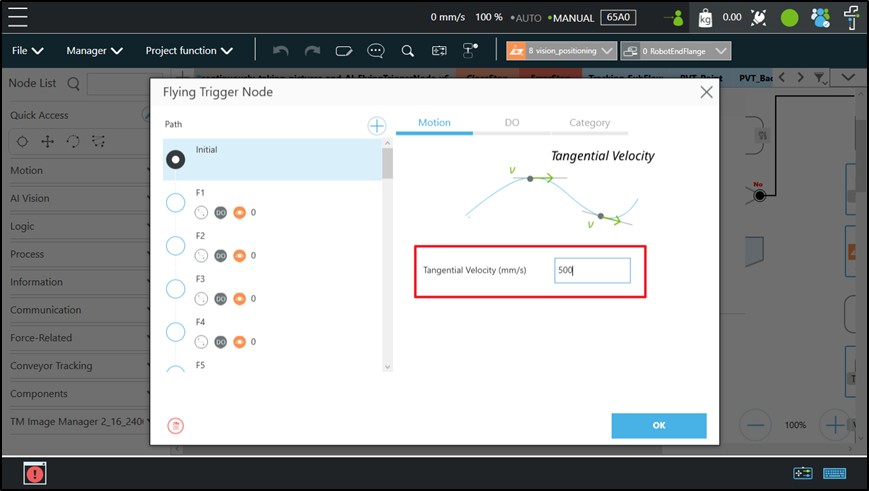
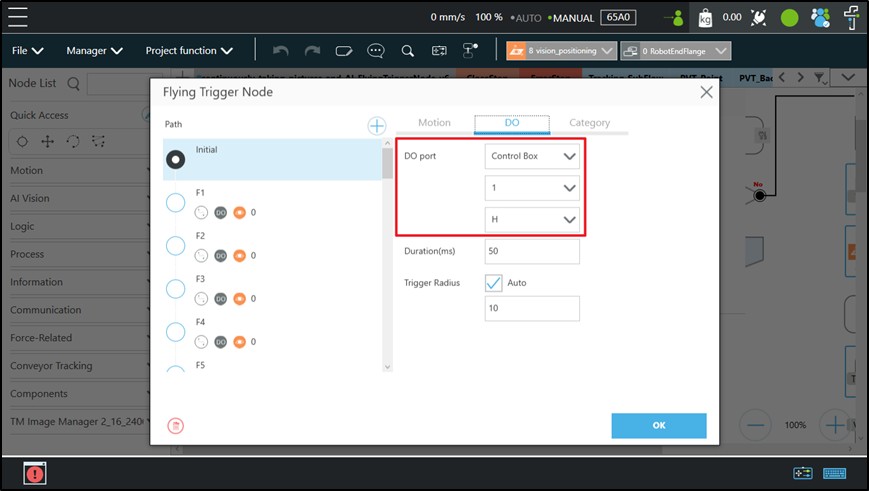
在初始設定中,設定移動速度。
設定觸發相機拍照的 DO(數位輸出),請根據配線時 PIN 2 所接的 DO 位置進行設定。本範例使用DO 0 觸發相機拍照。
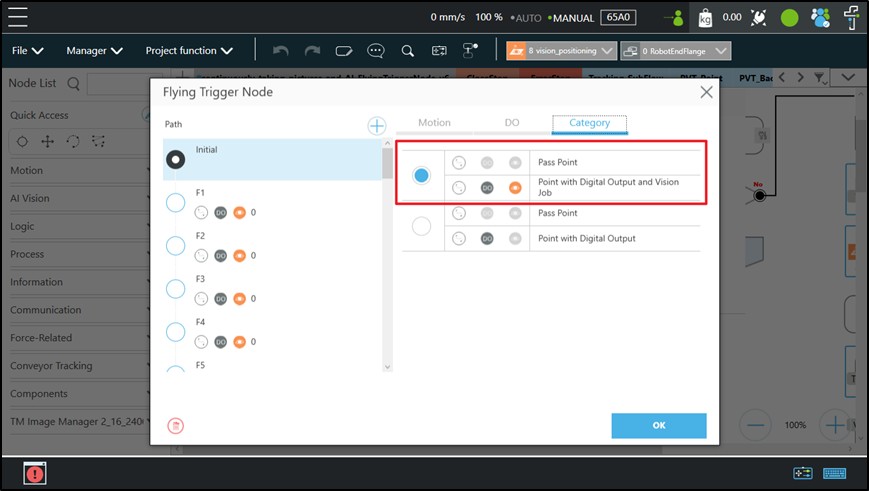
在Category頁面中選擇 Point with Digital Output and Vision Job。
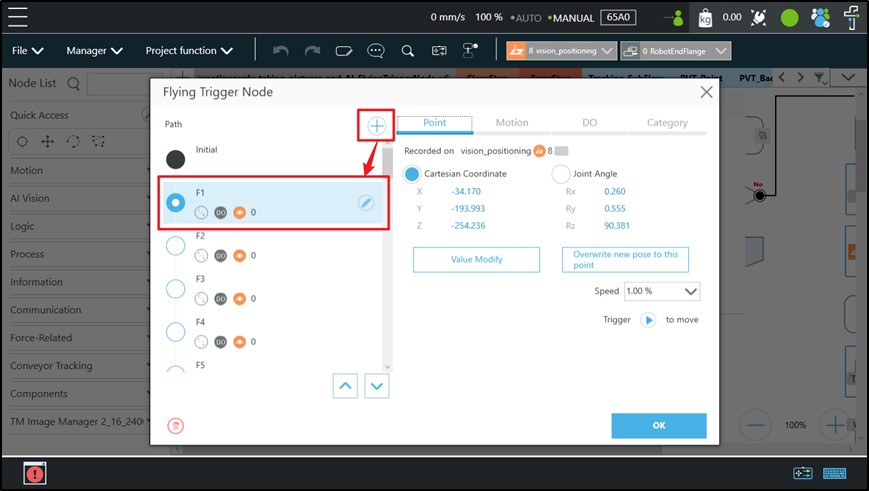
移動機器人至檢測點位,並新增一個點位。
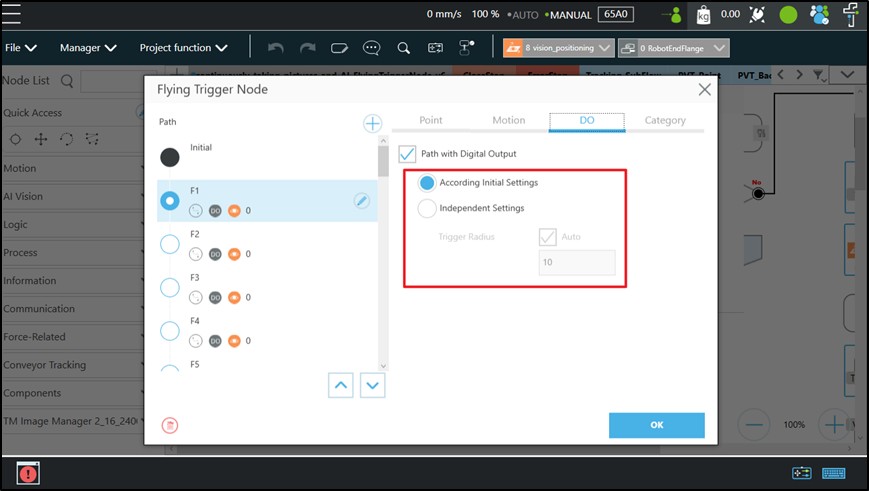
移動速度與 DO 設定可以從初始配置套用,也可以依照各點位需求個別調整。

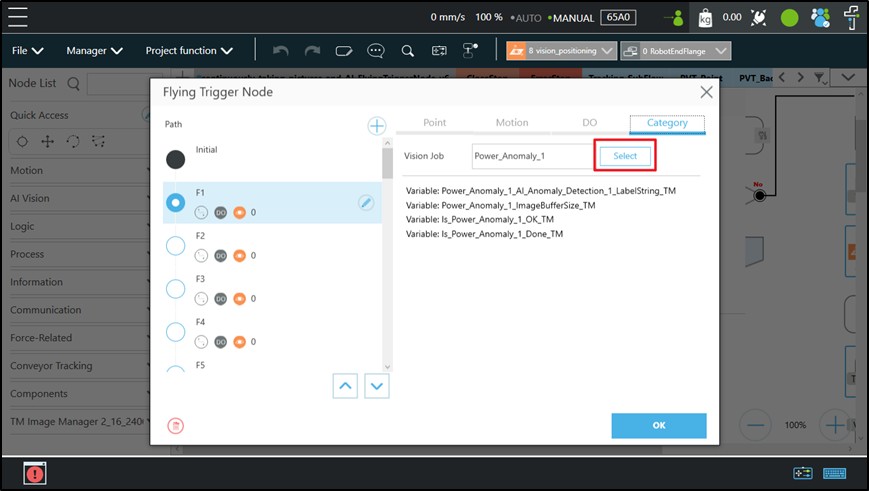
在Category頁面中點選 Select ,以編輯視覺任務。
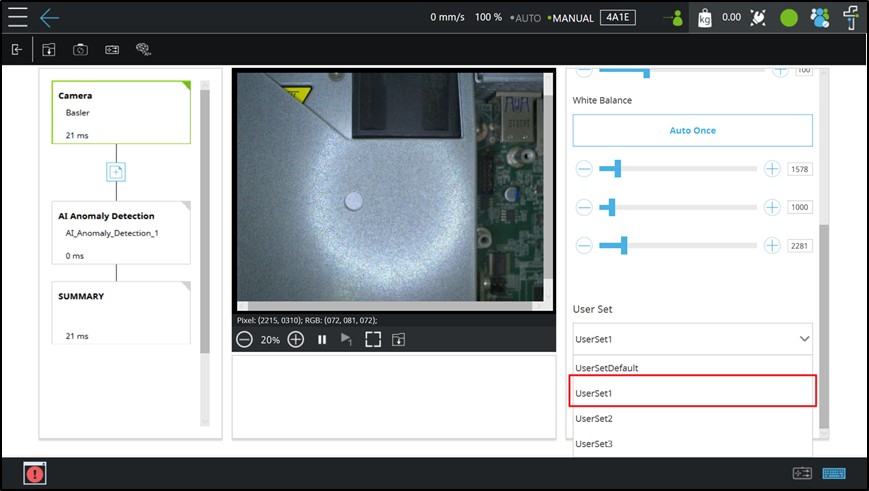
進入視覺任務的編輯頁面後,在相機設定頁面的User Set欄位中選擇 User Set 1。
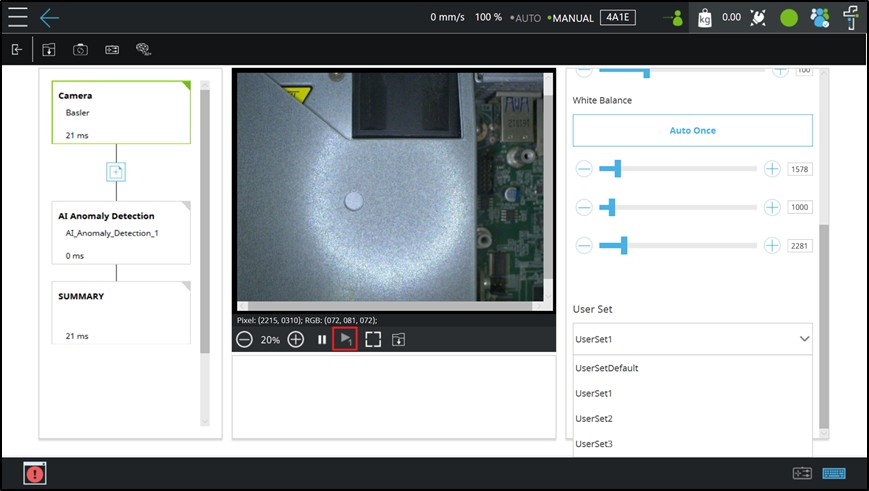
點選執行一次按鈕,將DO 0 切換為 High 狀態,並觸發相機拍攝影像。
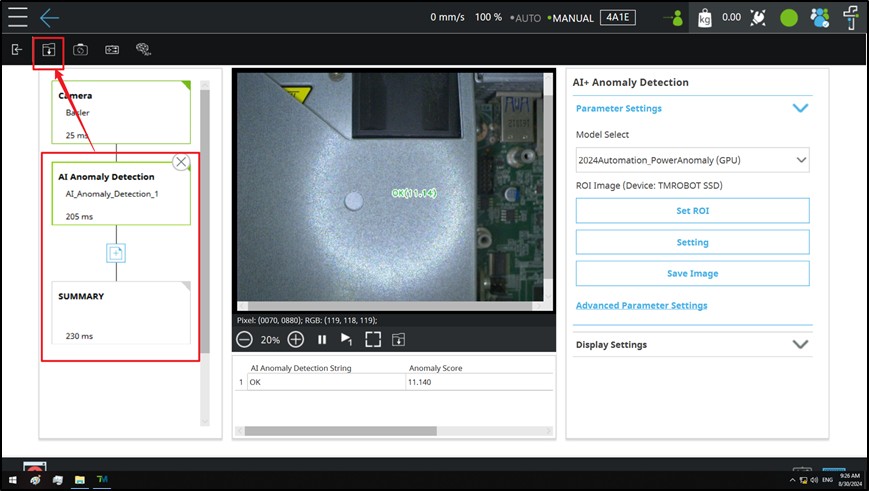
完成該點位之影像檢測流程,並儲存視覺任務。
依上述步驟,完成所有點位的設定與對應的檢測流程。
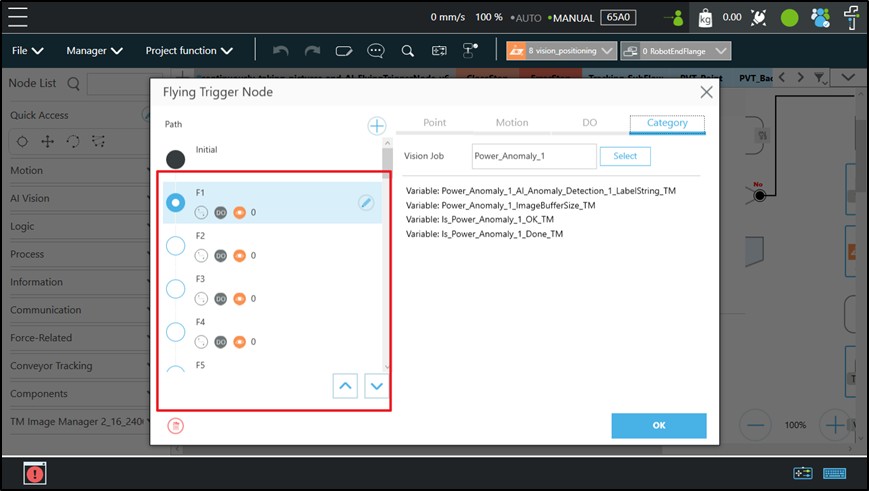
在 End 區段中可以檢視視覺任務的所有變數。