Examples are valid for :
TMflow Software version: All versions.
TM Robot Hardware version: All versions.
Other specific requirements: None
Note that older or newer software versions may have different results
TCP #
By the input of the TCP (Tool center point), weight, and center of mass of the gripper in TMflow, the robot can calculate the moderate torques to each axis to distribute to the output of each joint and prevent the robot from reporting errors or malfunctions for force errors.
Once not setting the TCP properly, an error (0x22, 0x35) may occur due to the abnormal loading on the robot during operation. When an error occurs, please first confirm that the TCP Payload is correctly set. If there is no way to rule out the situation, contact qualified and authorized service personnel.
For the maximum bearable payload and torque of the robot, refer to Payload and Torque in Hardware Installation Manual.

About setting the weight of end-effector and object #
Improper payload setting may cause the robot to stop during operation by triggering the safety system, and improper payload setting may reduce the lifetime of joint or damage the robot. Users should perform a full risk assessment including the end-effector and object to prevent hazards such as shocks, vibrations, collisions, entanglements, stabbings, and piercings to secure the entire system.
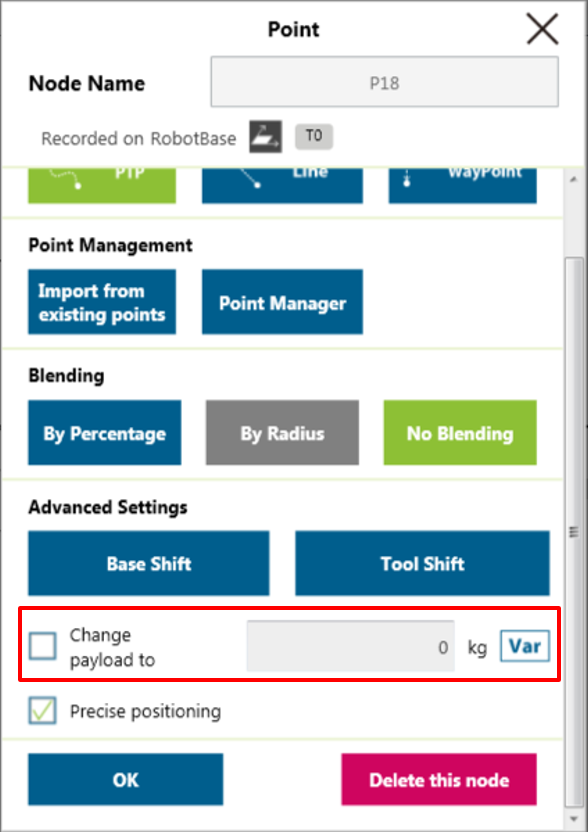
Use the total weight of the end-effector and the object to stay within the payload rating of the robot. Ensure that the system never exceeds that maximum payload. When setting payload, it is not only necessary to set the proper TCP parameters in the “TCP setting”, but also to set the weight of the object in “Point”. When different weights of objects may be picked up and placed in the same project, it is necessary to set the weight of the object in “Point” to avoid abnormalities and errors caused by inconsistencies between the total weight of the armload and the set parameters.