Examples are valid for:
TMflow Software version: 1.76.6300 or above.
TM Robot Hardware version: All versions.
Other specific requirements: None
Note that older or newer software versions may have different results.
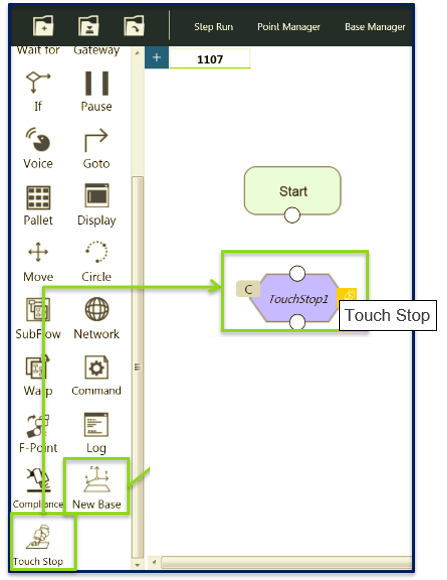
Objective of Touch Stop #
When the robot moves (relative to the flange and tool) from the initial position to a certain axis (e.g., the z-axis), it normally uses I/O signals and external force as criteria for stopping.
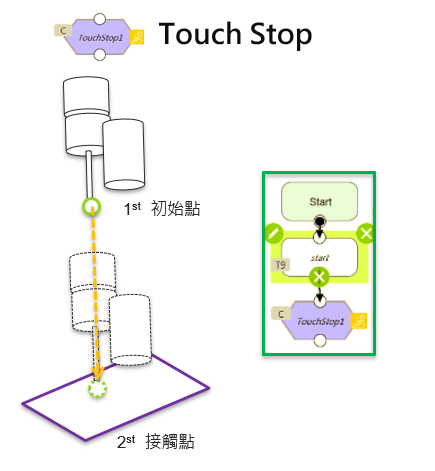
When the robot moves from the initial position using Compliance or Line, carries a tool with tolerance, and presses down for a certain distance, the tool sends an I/O signal to the robot to have the robot’s point recorded at the time of its release and used as a stop criterion for the Touch Stop node.
General use : Counting the tray height


Motion Setting : Choose Compliance, Line, or Force Sensor
Choose Base : Choose Tool or Current Base
Setting :
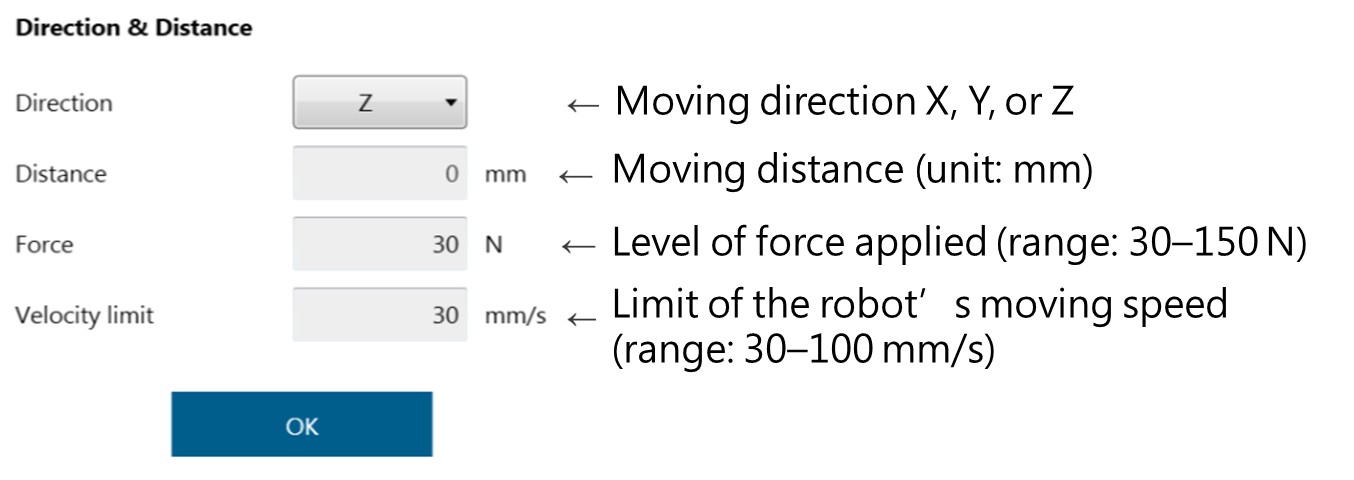
Moving Along a Single Axis #
Teach #
Teach can be set to Linear or Rotation. It calculates the distance and rotation angle you have taught.

Stop Criteria #
- Timeout: This determines how much time passes before the robot stops and releases itself from this node.
- Resisted: When resistance is detected, the robot stops and releases itself from this node
- Digital IO: A digital input signal (e.g., the suction cup’s IO signal) set as a criterion for the robot to stop and release itself from this node.
- Stroke % DIO Detection: When the moving distance exceeds the stroke percentage, a different INT value will be output to Variable for judgement.
- Variable: A variable set to receive the value of Stroke % for DIO Detection.
- Analog IO: An analog input signal set as a criterion for the robot to stop and releases itself from the node.
Touch Stop – Line #

Motion Setting : Choose Compliance, Line, or Force Sensor
Choose Base : Choose Tool or Current Base
Setting :
Stop Criteria:
- Digital IO: A digital input signal set as a criterion for the robot to stop and releases itself from the node.
- Analog IO: An analog inputs signal set as a criterion for the robot to stop and releases itself from the node.
- Brake Distance: The distance of the robot’s brake. If Distance in the Setting page is set to 100 mm and Brake Distance to 800 mm, then the robot will apply brake to stop after the end effector moves for 80 mm from the initial position.
The difference between Line and Compliance is that the former is used for position control (and so it does not use force resistance as a stop criterion), and Compliance for force control, which leads to soft floating on the part of the end effector.
Touch Stop – Force Sensor #

Only FT Sensors supported by Techman Robot are available.
Touch Stop – Force Sensor (Record Stopping Position on Point ) #
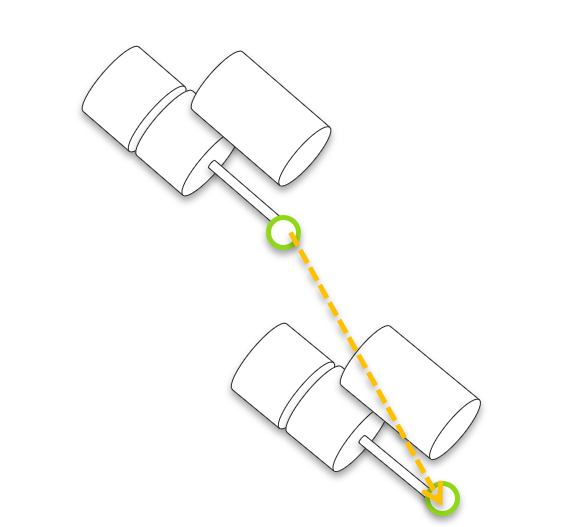
If the stop criterion is completed or met, the point will be recorded (see the figure above for an example)
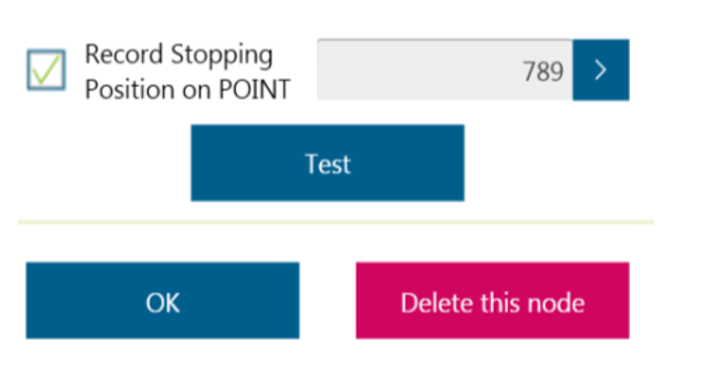
In this case, the point from which the robot releases itself can be sent.


