Examples are valid for:
TMflow Software version: 1.76.6300 or above.
TM Robot Hardware version: All versions.
Note that older or newer software versions may have different results.
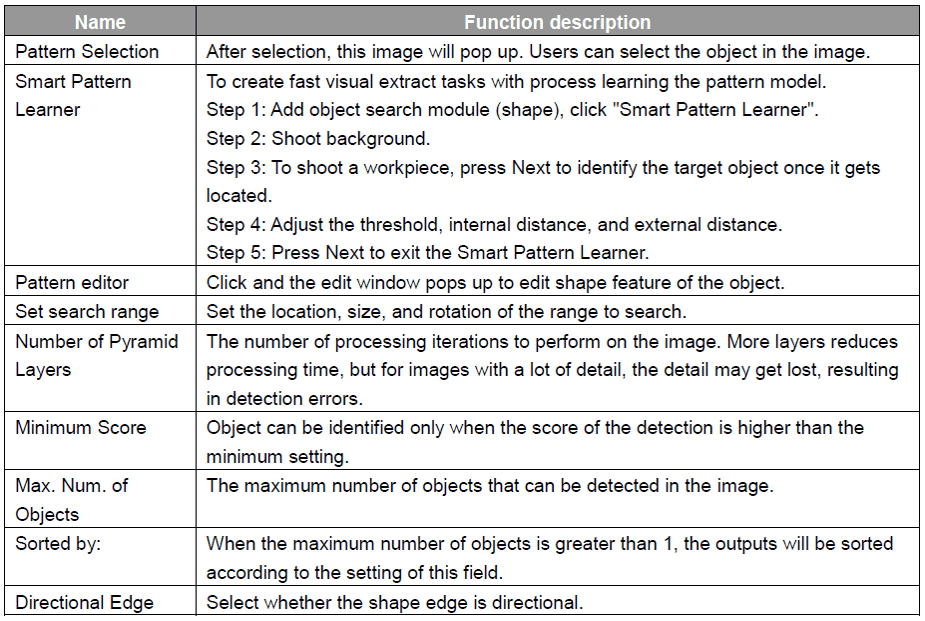
Pattern Matching(Shape) #
- The function uses the geometrical shape of the object as its pattern model and matches it to the input image to find the object in the image. It supports variations due to object rotation and dimension. It is best for objects with rigid profiles.
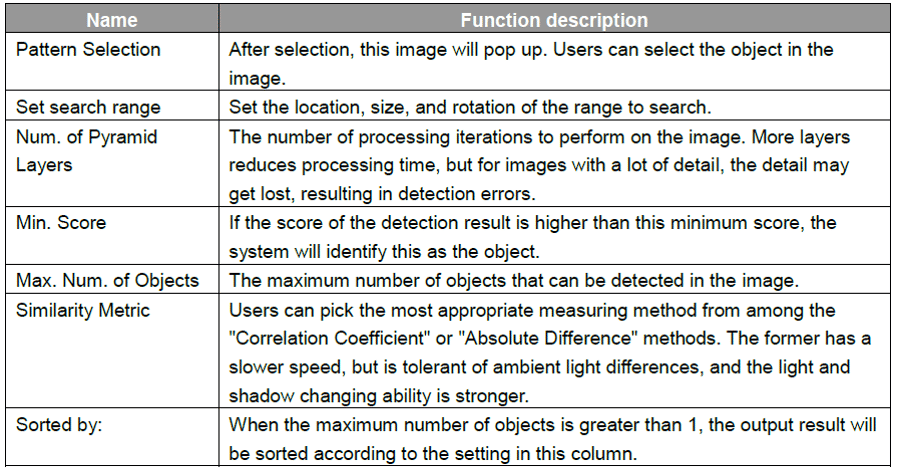
Pattern Matching (Image) #
- This function uses the image of the target object itself as its pattern model and matches it to the input image to position the object in the image. It supports variations due to object shift and rotation. Differing from shape pattern matching, this function does not support dimension changes and may take a long time to compute. It may be employed when the workpiece lacks visible features or has fuzzy edges.
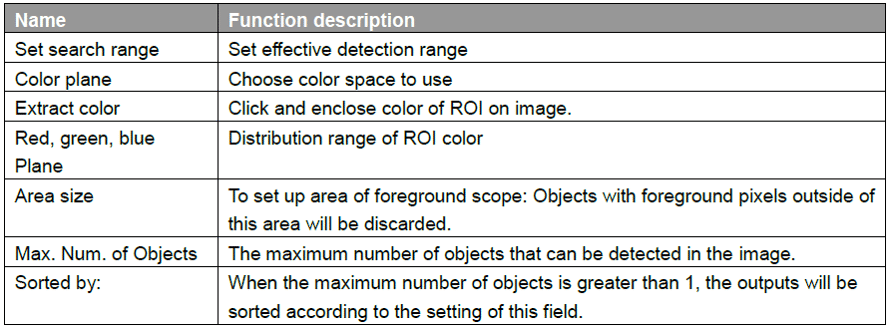
Blob Finder #
- Differing from detecting objects of fixed geometry by pattern matching, objects without fixed geometry should use this function for detection.
Fiducial Mark Matching #
- The Fiducial Mark Matching function is designed to detect and position the two positioning points on PCBs. It is fast and reliable. However, this function has a smaller search range and lower success rate when the objects zoomed or rotated. For example, this function is suitable for PCB operation, which features little shift in feeding position and requires quick and accurate positioning.



