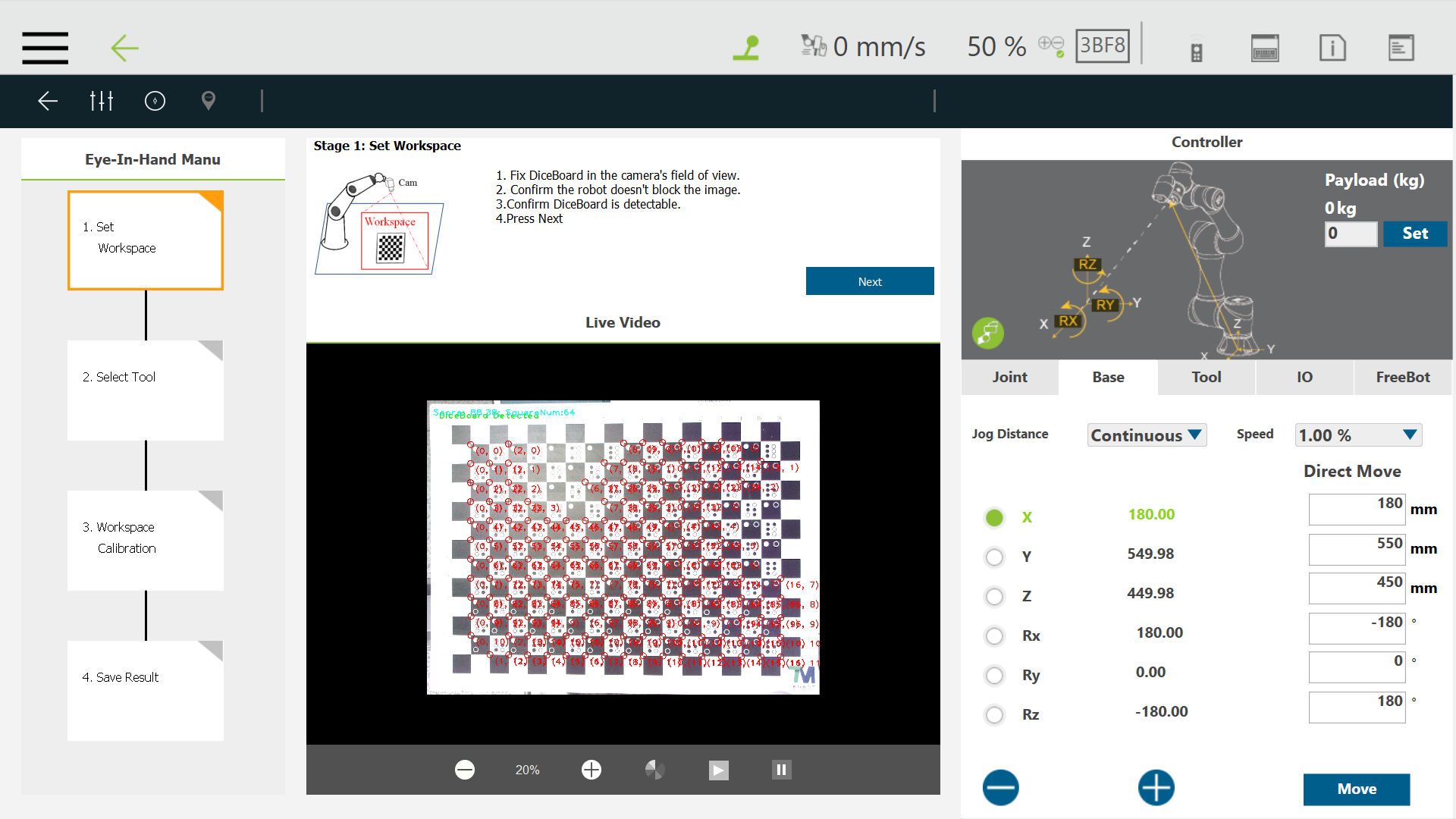
Step #1: Confirm Workspace: The robot must be positioned at the initial position of the robot in this workspace. Click Next
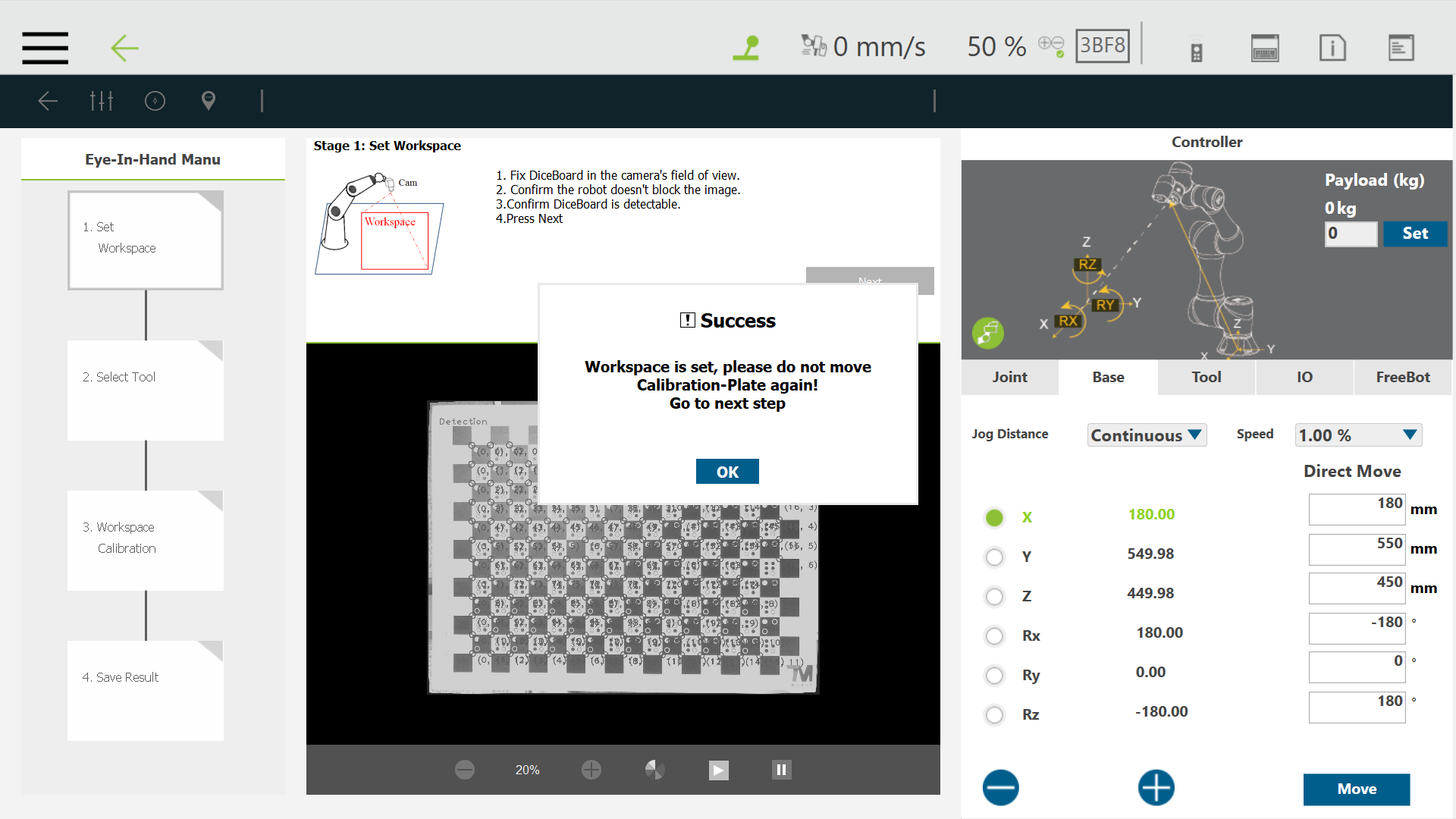
 Click OK
Click OK
Step #2: Set TCP Setting: Set the Z height, using TMflow (TCP Offset), for the calibration tool being used.
Step #3: Calibrate workspace: Point the calibration tool to the calibration plate grid shown on the screen. When being prompted. Click ‘Next’. Repeat this step five times. Use the controller to manipulate the robot when performing this calibration.
IMPORTANT: Once set up, do not move the calibration plate until the completion of the calibration process.

Step #4: Save Results: Once the accuracy has been validated, save the calibration results in a workspace file to access them in fixed vision jobs.


