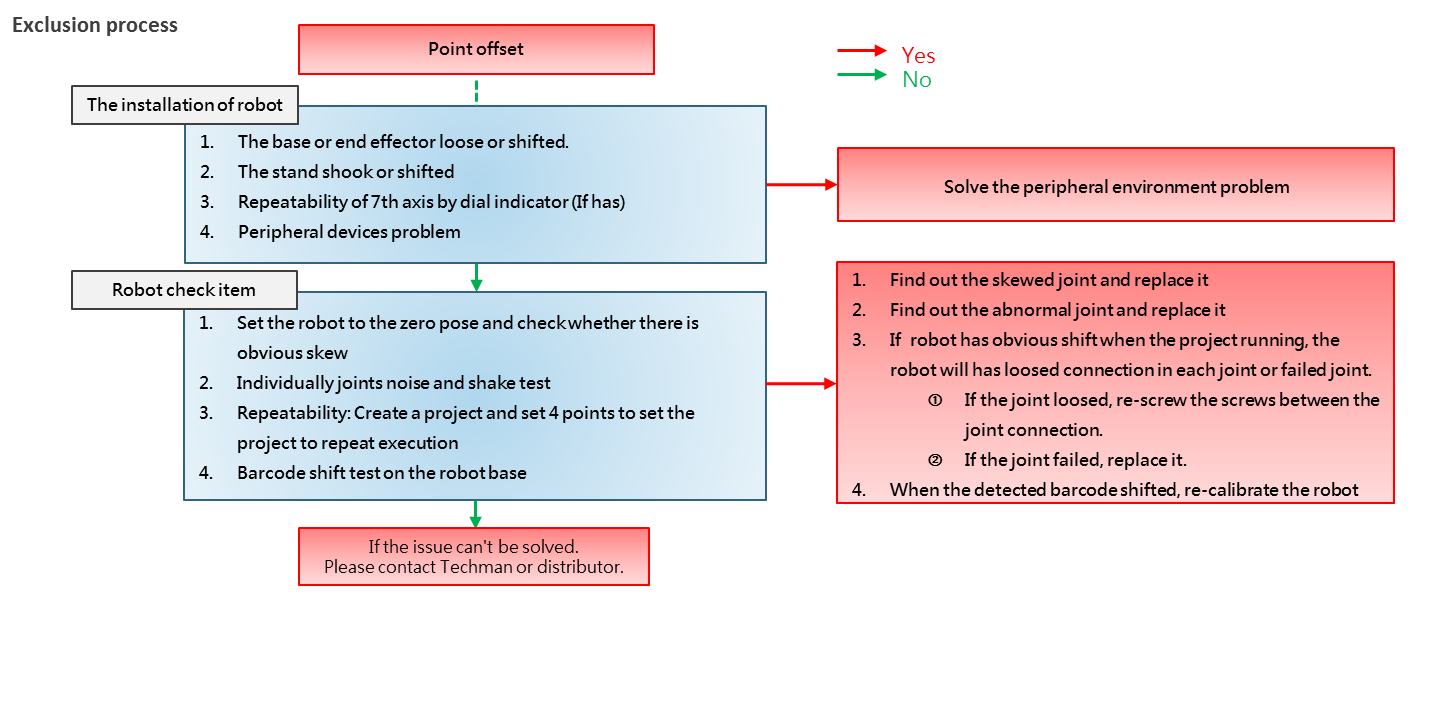
| Case description: | This section describes possible faults and suggested actions for each fault when the point offset. | |
| Result: | Project’s points offset due to the collision | |
| Possible reason: | The following are possible symptoms of IPC that cannot be start up:
1)Set the robot to home pose and check for obvious skew 2)Pin offset at the joint 3)The robot is not install well to the base or the base is shaken 4)Workspace offset due to the collision |
Common error code
NA |