Modbus #
Modbus is a Master/Slave type communication protocol. Users can use Modbus Master to read or write the parameters and save them in the robot register, such as position, posture and IO status. Users can program with the obtained parameters or monitor the status of robot. TM Robot provides two protocol versions of Modbus: Modbus TCP and Modbus RTU for users to get data from the external Modbus device or robot register. The external device, such as IPC or PLC, can also send commends to the TM Robot to get the related data as Master.
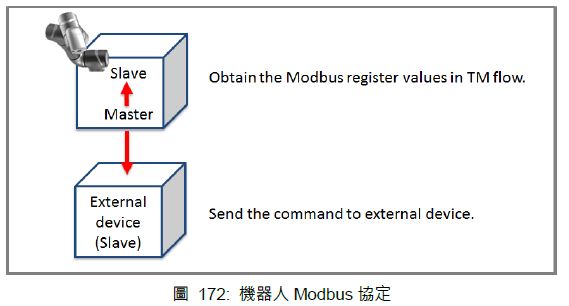
Modbus System Hardware/Software Structure #
Software #
-
Set Modbus TCP #
In the TMflow Setting page, click Connection to access the Modbus Slave Page, users must confirm that the IP is obtained in order to enable the Modbus TCP function. IP filter can set the network mask, and the communication with the robot must be in the set domain.
-
Set Modbus RTU #
In the Modbus Slave RTU setting page, parameters need to be synchronized with the external device before use. After the parameters are confirmed, Modbus RTU then can be opened through the Serial Port, allowing the robot to communicate with different devices.
Hardware #
- Modbus is divided into two protocol versions: Modbus TCP and Modbus RTU. Modbus TCP uses RJ45 for communication. There is only one position in the Control Box that can use RJ45 to perform communication of Modbus TCP: The “LAN” port marked in the Hardware Installation Manual. On the other hand, Modbus RTU uses a serial port for communication. Regarding the above connection approaches, refer to the instructions in the Hardware Installation Manual for the location of the connectors.


