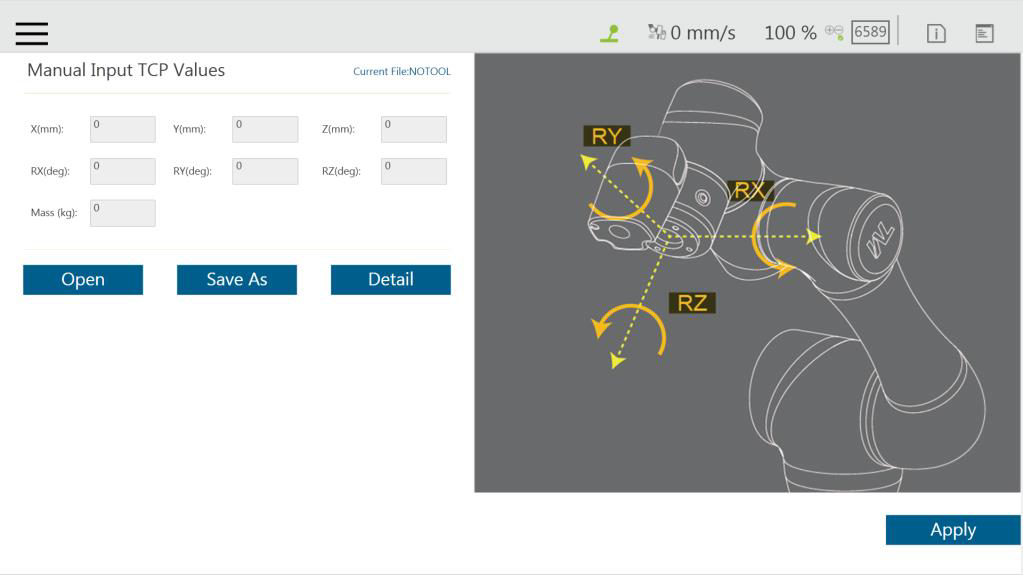
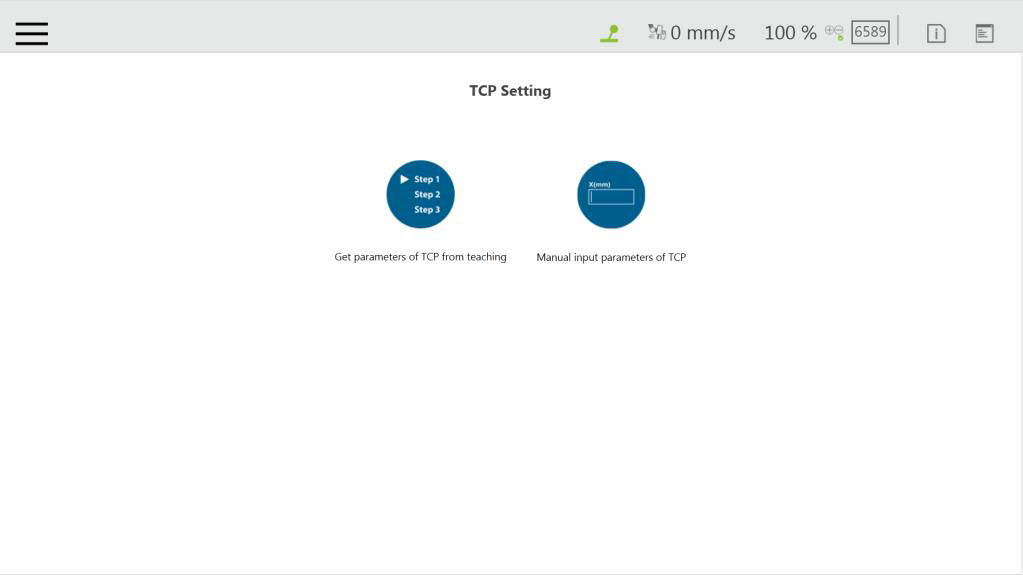
If users clearly know the TCP relative to the position of the robot flange, select the right button to input parameters manually.
- Input the known values into corresponding blanks.
- Click ‘Save’ as to create a new TCP.
- To modify the TCP parameter values, click ‘Open’ to select the item to be modified from the list, and after the modification is completed, click ‘Apply’ on the lower right corner to save the changes and set this TCP as the current TCP.
- In this interface, all TCP data on the robot can be managed. Click ‘Open’ to open the TCP list of the robot.