Table of Contents
———————————————————-
TM robot Hardware version: HW 3.2 or above
———————————————————-
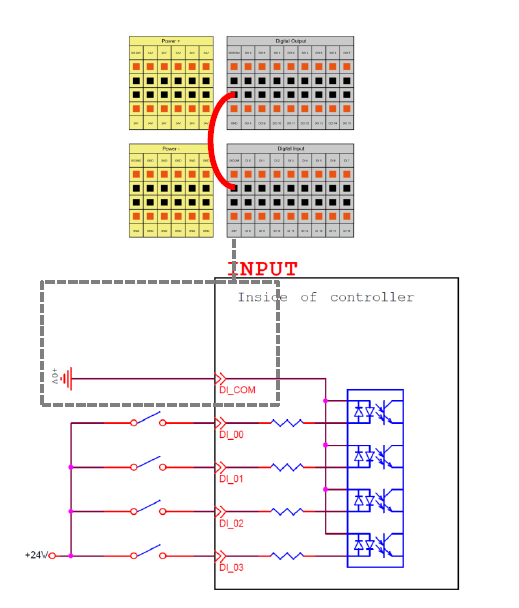
Set to Sink Input type #
When a device such as a transistor output sensor is connected, NPN open collector transistor output can be used.
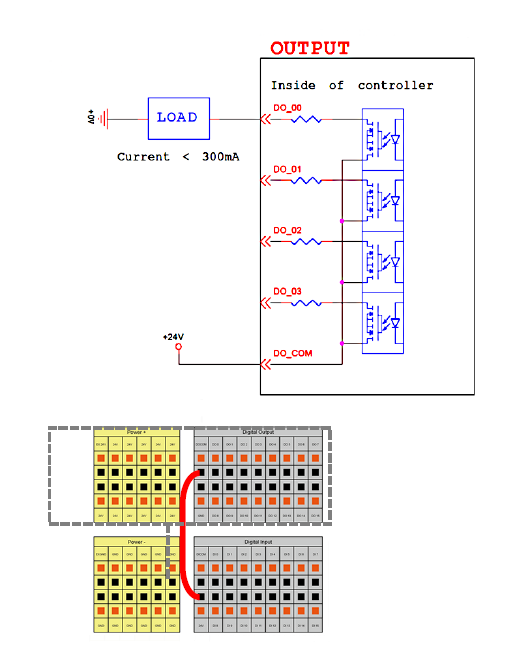
Set to Sink Output type #
Connect DO_COM terminal to the minus side of the power supply.
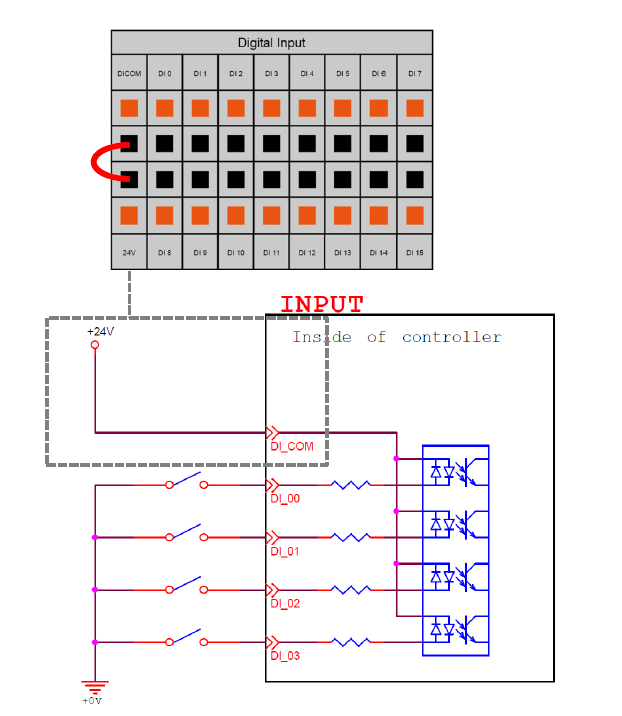
Set to Source input type #
When a device such as a transistor output sensor is connected, PNP open collector transistor output can be used.
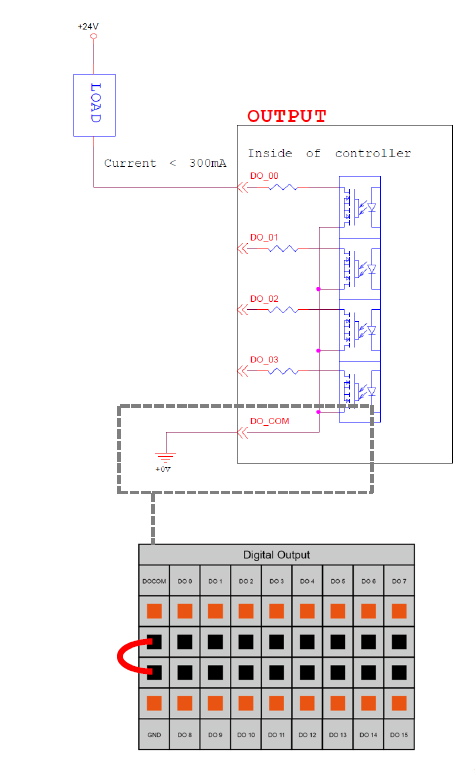
Set to Source output type #
Connect DO_COM terminal to the plus side of the power supply.