[mk_page_section bg_image=”https://www.tm-robot.com/wp-content/uploads/2020/07/banner_addon.png” bg_stretch=”true” min_height=”450″ full_width=”true” padding_top=”50″ padding_bottom=”0″ margin_bottom=”20″ sidebar=”sidebar-1″][vc_column][mk_fancy_title color=”#ffffff” size=”40″ force_font_size=”true” size_smallscreen=”40″ size_tablet=”38″ size_phone=”36″ margin_top=”50″ margin_bottom=”50″ font_family=”none”]
TM Add-on
[/mk_fancy_title][vc_row_inner is_fullwidth_content=”false”][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767295846{margin-bottom: 0px !important;}”]![]()
TMflow Editor
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767335088{margin-bottom: 0px !important;}”]
![]()
TMvision
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654769169477{margin-bottom: 0px !important;}”]![]()
Conveyor Tracking
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767408594{margin-bottom: 0px !important;}”]
![]()
TM ROS Driver
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767504090{margin-bottom: 0px !important;}”]![]()
TMstudio
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767541822{margin-bottom: 0px !important;}”]![]()
API Management
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1597376979625{padding-top: 100px !important;padding-bottom: 0px !important;}” id=”TMvision”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288223341{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMvisionアドオン
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594286515699{margin-bottom: 0px !important;}”]
TMvisionアドオンは、より強力なビジョン機能を備えたTM Robotにアップグレードできるソフトウェアです。
ロボットに追加のモジュールを装備して、ロボットビジョン機能を最大化します。
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″][mk_fancy_title margin_top=”20″ margin_bottom=”0″ font_family=”none”]
外部ビジョンモジュール (2D)
外部ビジョンモジュールを購入して、TM Robotと外部カメラとの接続を可能にし、下向き(Eye To Hand)あるいは上向き(Up-Ward Looking)
の固定カメラによる高度なビジョンのインストールを実装します。 利用可能なその他の外部カメラモデルについては、ここをクリックしてください。[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/eye-to-handeth.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594264034325{margin-bottom: 0px !important;}”]下向き(Eye-To-Hand)– アーム動作中に画像処理を実行できるため、合計サイクルタイムを短縮できます
– これは、コンベアトラッキング、オブジェクトのロードアンドアンロード、バーコードの読み取り、
品質検査などのアプリケーションに推奨されます[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/up-ward-looking.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388355946{margin-bottom: 0px !important;}”]上向き(Up-Ward Looking)– 位置決めの精度が向上します
– 携帯電話や電子機器の組み立てなど、高精度の組み立てが必要なアプリケーションに推奨されます[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978923434{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288234264{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
TM 3DVision
TM 3Dvisionモジュールは、TM Robotがさまざまな種類のオブジェクトに対して3Dオブジェクトの位置決めを実行するのに役立ちます。 このビジョンモジュールは、特定の3Dカメラモデルを使用する必要があります。詳細については、カメラ1とカメラ2をクリックしてください。 ユーザーは、このモジュールを使用して、外部3Dカメラでオブジェクトの3Dポイントクラウド(点群)を生成したり、事前定義されたオブジェクトのCADファイルを使用したりすることもできます。 この機能は、3つの異なる3Dオブジェクト位置決めモードを提供します。[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1594272875802{padding-bottom: 100px !important;}”][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/geometry.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1595388393193{margin-bottom: 0px !important;}”]
幾何形状モード
幾何学的形状を使用して
オブジェクトを識別します[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/pre-defined-cad.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286577965{margin-bottom: 0px !important;}”]
CADモード
事前定義されたCADモデルを使用して
オブジェクトを識別します[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/point-pose.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286565274{margin-bottom: 0px !important;}”]
点群モード
点群データを使用して、
不規則なオブジェクトを識別します[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][mk_page_section bg_color=”#1c2227″ min_height=”200″ padding_top=”100″ padding_bottom=”100″ sidebar=”wptimeline-sidebar”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1598327920866{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column][vc_column width=”1/2″][vc_column_text el_class=”AI-video” css=”.vc_custom_1600671677845{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
AIグループ化機能で視覚的な位置決め効率を向上させます
3Dカメラの視野内の点群を複数の小さなグループに分割するAIグループ化機能が含まれています。 視覚的位置決めのアルゴリズムは、各小グループに配置されるオブジェクトを検索できるため、アルゴリズムの計算量が減り、位置決め効率が向上します。[/vc_column_text][vc_column_text css=”.vc_custom_1606470010677{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
衝突チェック機能
3Dビジョンは、3Dビンピッキングアプリケーションでよく使用されます。衝突チェック機能により、TM Robotが周囲のオブジェクトやロボットアーム自体と衝突するのを防ぐことができます。 この機能は、衝突を事前に回避するために有効です。[/vc_column_text][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1606441361936{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
AIモジュール
AIモジュールは、TM Robotが深層学習モデルをインポートできるようにし、AIによるオブジェクトの分類と検出を実行できるようにします。 このTMvisionモジュールの学習には、TM Robot用に設計されたトレーニングサーバーソフトウェアであるTMAI +ソリューションを使用する必要があります。 TM AI +の詳細については、ここをクリックしてください。
このTMvisionモジュールは、TM Robot用に設計されたトレーニングサーバーソフトウェアであるTMAI +ソリューションで使用する必要があります。 詳細については、ここをクリックしてください。
*1ライセンスは1つのロボットアームのみで使用できます
[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-classification.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286675137{margin-bottom: 0px !important;}”]
AIによる分類
画像内のオブジェクトが属するカテゴリを分類します[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-detection.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594348888298{margin-bottom: 0px !important;}”]
AIによる認識
画像内のすべての異なるタイプのオブジェクトを検出して特定します[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978959350{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
その他の高度なビジョンモジュール
以下のモジュールを購入して、より多くの種類のロボットビジョン機能を取得してください:[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ocr-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388563972{margin-bottom: 0px !important;}”]
OCRモジュール
- 文字認識(アルファベットのみ)と数字認識
- Arial、Verdana、Times New Romanなど、9つの一般的なフォントとその太字フォーマットをサポートします
- 数字認識は、正/負の数値と小数点を判別できます
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/identify-measure-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286800985{margin-bottom: 0px !important;}”]
モジュールの特定と測定
- 姿勢の検出、特定の色の領域サイズ、参照画像の減算、線のバリ、カウント(不規則なオブジェクト、形状、画像)、距離と角度の測定などが含まれます
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row css=”.vc_custom_1601978833200{padding-top: 200px !important;}” id=”TMflowEditor”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMflow Editor
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610695886445{padding-bottom: 200px !important;}”][vc_column width=”1/2″][mk_fancy_title size=”36″ force_font_size=”true” size_smallscreen=”36″ size_tablet=”34″ size_phone=”30″ margin_bottom=”” font_family=”none” animation=”fade-in”][/mk_fancy_title][vc_column_text css=”.vc_custom_1595388716901{margin-bottom: 0px !important;}”]
TMflowオフラインプログラミング
TMflow Editorは、プロジェクトをオフラインで開いて編集するためのソフトウェアです。 ユーザーは、ロジック、変数、モーションタイプ、フロー全体のレイアウトなど、すべてのノードを事前に編集できます。 プロジェクトをTMコントローラーにインポートしたあと、事前に設定したノード名に従って、実際の教示点を簡単に上書きできます。
新しいソフトウェアを学習する必要はありません
追加のトレーニングや学習は必要ありません。TMflowEditorとTmflowの使い方は同じです。 ユーザーのパーソナルコンピューターで、TMflowエディターはプロジェクトを簡単に構築および編集できます。
ロボットの生産効率を維持する
TMflow Editorは、プロジェクト(ロジック、変数など)をオフラインで変更できるため、ロボットの停止時間を削減できます。 ユーザーは、簡単な操作でコンピューター上のプロジェクトを簡単に変更できます。 プロジェクトをオフラインで調整し、実際のロボットにインポートします。 ロボットの停止時間は最小限ですみます。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img1.jpg” image_size=”medium” align=”center” margin_bottom=”20″ animation=”fade-in”][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img2.jpg” image_size=”full” animation=”bottom-to-top”][/vc_column][/vc_row][vc_row id=”TMstudio”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMstudio
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610701472977{padding-bottom: 200px !important;}” id=”TMstudio”][vc_column width=”1/3″ css=”.vc_custom_1610695482724{background-color: #ffffff !important;}”][vc_column_text css=”.vc_custom_1616483973398{margin-bottom: 0px !important;}”]
ワークステーション
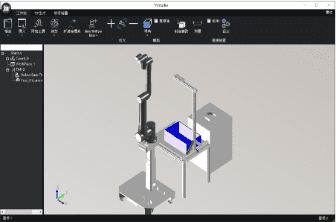
ユーザーは、実際にロボットワークステーションを構築して開発する前に、シミュレーション用のロボットと環境のモデルをインポートできます。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/3″][vc_column_text css=”.vc_custom_1616484011493{margin-bottom: 0px !important;}”]
TCP生成
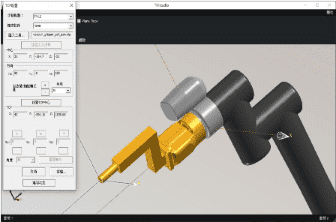
ユーザーがエンドエフェクタのCADファイルにTCP情報を設定できるようにします。
TM 3DVisionアプリケーション
生成されたロボットワークステーションとTCPは、TMflowにインポートされ、TM3DVisionバラ積み
ピッキングアプリケーションで使用できます。 さらに、TMflow衝突チェックノードと組み合わせて、対象ワークの選択/配置プロセス中の衝突を防ぐことができます。[/vc_column_text][/vc_column][vc_column width=”1/3″][vc_column_text css=”.vc_custom_1616484054995{margin-bottom: 0px !important;}”]
パレタイジングウィザード
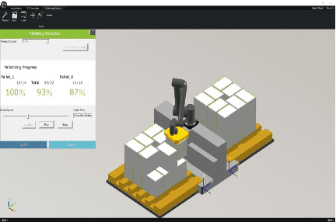
パレタイジングウィザード:パレタイジングの軌道を
シミュレートしてTM Palletizing Operatorにエクスポートします。
TM Palletizing Operatorアプリケーション
TMstudio パレタイジングウィザードは、カスタマイズされたパレタイズタスク、パレタイズシミュレーション、および衝突チェックに最適なソリューションを提供する
アプリケーションベースのソフトウェアです。[/vc_column_text][/vc_column][/vc_row][vc_row id=”TMRos”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
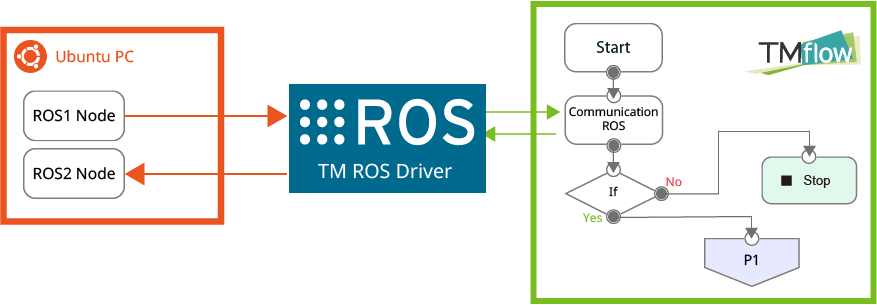
TM ROS Driver
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594274522422{margin-bottom: 0px !important;}”]
独自に開発したプログラムを使用してTM Robotを自由に制御
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1597377250962{padding-bottom: 200px !important;}” id=”TMROSdriver”][vc_column][vc_column_text css=”.vc_custom_1616912276106{margin-bottom: 0px !important;}”]
TM ROS Driverは、独自に開発したプログラムでTM Robotを制御したい開発者向けに設計されています。
TM ROS Driverは、TM Robotのオペレーティングソフトウェア(TMflow)を外部プログラムに接続し、ロボットの制御を外部プログラムに行わせることが出来ます。
 [/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]
[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348831463{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348841485{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695838891{padding-top: 100px !important;background-color: #fafafa !important;}” id=”ConveyorTracking”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
Conveyor Tracking
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695928092{margin-bottom: 200px !important;padding-bottom: 50px !important;background-color: #fafafa !important;}”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1594286871201{margin-bottom: 0px !important;}”]
ワークハンドリングに対する最高の解決策
コンベアトラッキングは、視覚またはセンサーに基づいてオブジェクトの位置・
姿勢を検出し、非常に正確な動的コンベアトラッキングを実現します。
ソフトウェアとハードウェアの完全な統合
カメラ、エンコーダー、EtherCAT拡張モジュールを使用することができます。
追加のコントローラーは不要です。[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2018/07/addon_section1_img.png” image_size=”full” animation=”fade-in”][/vc_column][/vc_row][vc_row id=”api”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TM Robot マネージメント API
[/mk_fancy_title][vc_column_text css=”.vc_custom_1610698110430{margin-bottom: 0px !important;}”]
TMロボットをシステムに接続してIoT管理を実現
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][vc_column_text css=”.vc_custom_1625207755566{margin-bottom: 0px !important;}”]現在、IoT管理システムを自社工場に導入する企業が増加しています。あらゆる機器やデバイスからデータを収集し、監視と分析を行います。当社のTMロボットマネージメント APIは、システム開発者がTMロボットを既存のシステムに簡単に統合できるように支援します。このように、経営者がIoTを活用してビジネス価値や投資収益を高めることを支援します。[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484496043{margin-bottom: 0px !important;}”]
 簡単に導入可能
簡単に導入可能
LinuxやUbuntuなどのプラットフォームに対応
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484573285{margin-bottom: 0px !important;}”]
 複数のロボットが接続可能
複数のロボットが接続可能
IoT管理を実現
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484610773{margin-bottom: 0px !important;}”]
 様々なインターフェースに対応
様々なインターフェースに対応
様々な言語で迅速に統合可能
[/vc_column_text][/vc_column_inner][/vc_row_inner][vc_column_text css=”.vc_custom_1611039300804{margin-bottom: 0px !important;}”]
TMロボットマネージメントAPIは、複数のデータ通信インターフェイスに対応しており、あらゆる製造データを管理してIoT管理を行うための効率を向上させることができます。
[/vc_column_text][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/01/addon_api_img1.png” image_size=”full” align=”center”][vc_column_text css=”.vc_custom_1611814281088{margin-bottom: 0px !important;}”]
複数のTMロボットからデータを収集し、ユーザーが使用している既存の管理システムで利用出来る為、今まで実現できなかったデータ応用が可能になります。
[/vc_column_text][/vc_column][/vc_row]