[mk_page_section bg_image=”https://www.tm-robot.com/wp-content/uploads/2020/07/banner_addon.png” bg_stretch=”true” min_height=”450″ full_width=”true” padding_top=”50″ padding_bottom=”0″ margin_bottom=”20″ sidebar=”sidebar-1″][vc_column][mk_fancy_title color=”#ffffff” size=”40″ force_font_size=”true” size_smallscreen=”40″ size_tablet=”38″ size_phone=”36″ margin_top=”50″ margin_bottom=”50″ font_family=”none”]
TM Add-on
[/mk_fancy_title][vc_row_inner is_fullwidth_content=”false”][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767295846{margin-bottom: 0px !important;}”]![]()
TMflow Editor
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767335088{margin-bottom: 0px !important;}”]
![]()
TMvision
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654769169477{margin-bottom: 0px !important;}”]![]()
Conveyor Tracking
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767408594{margin-bottom: 0px !important;}”]
![]()
TM ROS Driver
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767504090{margin-bottom: 0px !important;}”]![]()
TMstudio
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/6″][vc_column_text css=”.vc_custom_1654767541822{margin-bottom: 0px !important;}”]![]()
API Management
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1597376979625{padding-top: 100px !important;padding-bottom: 0px !important;}” id=”TMvision”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288223341{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TM 비전 Add-On
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594286515699{margin-bottom: 0px !important;}”]
TM비전 Add-On은 TM로봇을 보다 강력한 비전 기능으로 업그레이드 할 수 있는 소프트웨어 액세스 기능입니다. 로봇의 비전기능을 극대화하기 위해 추가 모듈을 장착하십시오.
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″][mk_fancy_title margin_top=”20″ margin_bottom=”0″ font_family=”none”]
외부 비전 모듈 (2D)
외부 비전 모듈을 구입하여 TM 로봇과 외부 카메라를 연결하고, Eye-to-Hand 및 Upper-Looking 카메라 위치와 같은 고급 비전 설치를 구현하십시오. 사용 가능한 외부 카메라 모델에 대해 자세히 알아보려면 여기를 클릭하십시오.[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/eye-to-handeth.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594264034325{margin-bottom: 0px !important;}”]Eye-TO-Hand(ETH)
– 카메라와 로봇팔이 동시에 따로 동작할 수 있어 총 사이클 타임을 단축할 수 있습니다.
– 컨베이어 트래킹, 물체 로딩/언로딩, 바코드 판독, 품질 검사 등과 같은 응용 분야에 권장됩니다.[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2020/07/up-ward-looking.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388355946{margin-bottom: 0px !important;}”]Up-Ward Looking
– Up-Ward Looking 모드는 더욱 정밀합니다.
– 휴대전화나 전자제품 조립과 같은 고정밀 조립이 필요한 어플리케이션에 이 방법을 사용하는 것이 좋습니다.[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978923434{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false” css=”.vc_custom_1594288234264{padding-top: 100px !important;}”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
TM 3DVision
TM 3D 비전 모듈은 TM로봇이 다양한 종류의 3D 물체의 위치설정을 수행할 수 있도록 돕습니다. 이 로봇 비전 모듈은 선택된 3D 카메라 모델과 함께 사용해야 하며 자세한 내용을 보려면 여기를 클릭하십시오. 사용자는 또한 이 모듈을 사용하여 외부 3D 카메라가 있는 물체에 대한 3D 포인트 클라우드를 생성하거나, 물체의 사전 CAD 도면 파일을 사용할 수 있습니다. 이 기능은 다음과 같은 세 가지 다른 3D 객체 위치 설정 모드를 제공합니다.[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1594272875802{padding-bottom: 100px !important;}”][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/geometry.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1595388393193{margin-bottom: 0px !important;}”]
기하학적 구조
기하학적 구조를 사용하여 객체를 식별[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/pre-defined-cad.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286577965{margin-bottom: 0px !important;}”]
사전 CAD 도면
사전 CAD 모델의 도면을 사용하여 개체를 식별[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/3″][vc_row_inner][vc_column_inner width=”1/3″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/point-pose.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”2/3″][vc_column_text css=”.vc_custom_1594286565274{margin-bottom: 0px !important;}”]
포인트 포즈
포인트 포즈를 사용하여 불규칙한 모양의 개체를 식별[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][mk_page_section bg_color=”#1c2227″ min_height=”200″ padding_top=”100″ padding_bottom=”100″ sidebar=”wptimeline-sidebar”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1598327920866{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column][vc_column width=”1/2″][vc_column_text el_class=”AI-video” css=”.vc_custom_1600671677845{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
AI 클러스터링 기능으로 위치설정의 호율성 향상
이 모듈에는 미확인 물체를 여러 그룹으로 나눌 수 있는 AI클러스터링 기능이 포함되어 있습니다. 이것은 계산 노력을 줄이고 물체 배치에 필요한 시간을 단축하는 데 도움이 될 수 있습니다.[/vc_column_text][vc_column_text css=”.vc_custom_1606470010677{margin-bottom: 0px !important;padding-right: 1rem !important;padding-left: 1rem !important;}”]
충격 확인 기능
3D 비전은 3D 빈 피킹 어플리케이션에서 자주 사용되며, 충돌 확인 기능으로 TM 로봇이 주변 물체와 충돌하거나 로봇 팔 자체가 충돌하는 것을 막을 수 있습니다. 이 기능은 사전에 충돌을 피하는데 유용합니다.[/vc_column_text][/vc_column][/mk_page_section][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1606441361936{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
AI 모듈
TM 로봇이 딥러닝 모델을 가져올 수 있는 AI 모듈로, AI 물체 분류, AI 물체 탐지를 수행할 수 있습니다.
*각 라이선스 당 로봇 팔 1개 사용 가능
**이러한 TM비전 모듈은 TM로봇용으로 설계된 교육용 서버 소프트웨어인 TM AI+솔루션과 함께 사용해야 합니다. TM AI+에 대하여 자세히 알아보려면 여기를 클릭 하십시오.
[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-classification.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286675137{margin-bottom: 0px !important;}”]
AI 분류
로봇팔은 제품의 라벨을 기반으로 개체를 분류할 수 있습니다.[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ai-detection.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594348888298{margin-bottom: 0px !important;}”]
AI 검색
로봇 팔은 라벨을 기반으로 모든 물체를 감지하고 식별할 수 있으며 이를 표시할 수 있습니다.[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” equal_columns=”true” css=”.vc_custom_1601978959350{padding-top: 100px !important;padding-bottom: 0px !important;}”][vc_column][vc_row_inner is_fullwidth_content=”false”][vc_column_inner][mk_fancy_title margin_top=”20″ font_family=”none”]
다른 고급 비전 모듈
더 많은 유형의 로봇 비전 기능을 사용하시려면 다음 모듈을 구매하십시오[/mk_fancy_title][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false”][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/ocr-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1595388563972{margin-bottom: 0px !important;}”]
OCR 모듈
- OCR 및 숫자 OCR 포함합니다.
- 9개의 기본 폰트와 Arial, Verdana, Times New Roman 등과 같은 굵은 폰트도 지원합니다.
- 숫자 OCR은 양수/음수 및 소수점을 결정할 수 있습니다.
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][vc_column width=”1/2″][vc_row_inner][vc_column_inner width=”1/4″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/03/identify-measure-module.png” image_size=”full” align=”center”][/vc_column_inner][vc_column_inner width=”3/4″][vc_column_text css=”.vc_custom_1594286800985{margin-bottom: 0px !important;}”]
식별 및 측정 모듈
- 포즈 변화, 특정 색상 면적 크기, 이미지 자르기, 라인 버, 카운트(비정규 객체, 형상, 이미지), 거리 및 각도 측정 등을 포함합니다.
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row css=”.vc_custom_1601978833200{padding-top: 200px !important;}” id=”TMflowEditor”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMflow Editor
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610695886445{padding-bottom: 200px !important;}”][vc_column width=”1/2″][mk_fancy_title size=”36″ force_font_size=”true” size_smallscreen=”36″ size_tablet=”34″ size_phone=”30″ margin_bottom=”” font_family=”none” animation=”fade-in”][/mk_fancy_title][vc_column_text css=”.vc_custom_1595388716901{margin-bottom: 0px !important;}”]
TMflow 오프라인 프로그래밍
TMflow Editor는 오프라인에서 프로젝트를 열고 편집할 수 있는 편리한 방법을 제공합니다. 사용자는 로직, 변수, 다양한 움직임, 전체 플로우의 레이아웃을 포함한 모든 노드를 미리 편집할 수 있습니다. 제작한 프로젝트를 TM 컨트롤러에 가져오면 미리 설정된 노드 이름에 따라 실제 포인트에 쉽게 덮어씌울 수 있습니다.
새로운 소프트 웨어를 배울 필요가 없습니다.
추가 교육과 학습이 필요 없는 TMflow Editor는 TMflow와 동일한 인터페이스를 가지고 있습니다. TMflow Editor는 사용자의 개인 PC에서 프로젝트를 쉽게 제작하고 편집할 수 있습니다.
로봇의 생산 효율성 유지
TMflow Editor는 오프라인에서 프로젝트(로직, 변수 등)를 수정할 수 있어 로봇이 정지 시간 비용을 줄일 수 있습니다. 사용자는 간단한 조작으로 컴퓨터의 프로젝트를 쉽게 수정할 수 있습니다. 프로젝트를 오프라인으로 수정하고 실제 로봇에 적용하십시오. 로봇의 생산성을 유지할 수 있습니다.[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img1.jpg” image_size=”medium” align=”center” margin_bottom=”20″ animation=”fade-in”][mk_image src=”https://tm-robot.com/wp-content/uploads/2018/07/addon_section2_img2.jpg” image_size=”full” animation=”bottom-to-top”][/vc_column][/vc_row][vc_row id=”TMstudio”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TMstudio
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1610701472977{padding-bottom: 200px !important;}” id=”TMstudio”][vc_column width=”1/3″ css=”.vc_custom_1610695482724{background-color: #ffffff !important;}”][vc_column_text css=”.vc_custom_1616483973398{margin-bottom: 0px !important;}”]
Workstation
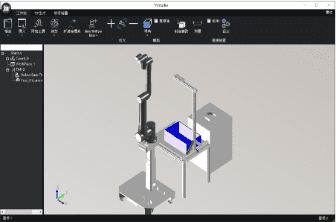
실제로 워크 스테이션을 구축하고 로봇 프로젝트를 개발하기 전에 시뮬레이션을 위해 로봇 및 환경 모델을 가져옵니다.[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/3″][vc_column_text css=”.vc_custom_1616484011493{margin-bottom: 0px !important;}”]
TCP 생성
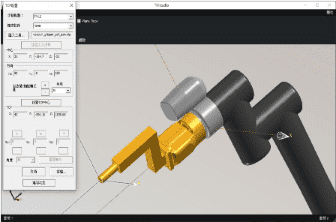
사용자가 도구상자 끝에 있는 CAD 파일에서 TCP 정보 설정하도록 지원
TM 3DVision 애플리케이션
생성된 워크 스테이션 및 TCP를 TMflow로 가져온 뒤 TM 3DVision Bin Picking 응용 프로그램에서 사용할 수 있습니다. 또한 TMflow 충돌 검사 노드와 결합하여 개체를 선택/배치하는 과정에서 충돌을 방지할 수 있습니다.[/vc_column_text][/vc_column][vc_column width=”1/3″][vc_column_text css=”.vc_custom_1616484054995{margin-bottom: 0px !important;}”]
팔레타이징 마범사
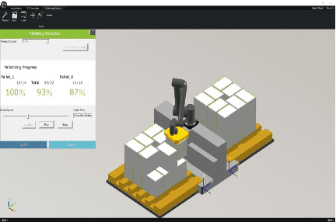
TM Palletizing Operator Application
TMstudio팔레이징 마법사는 맞춤형 팔레타이징 작업, 시뮬레이션 및 충돌 검사를 위한 최상의 솔루션을 제공하는 애플리케이션 기반 소프트웨어입니다.[/vc_column_text][/vc_column][/vc_row][vc_row id=”TMRos”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TM ROS Driver
[/mk_fancy_title][vc_column_text css=”.vc_custom_1594274522422{margin-bottom: 0px !important;}”]
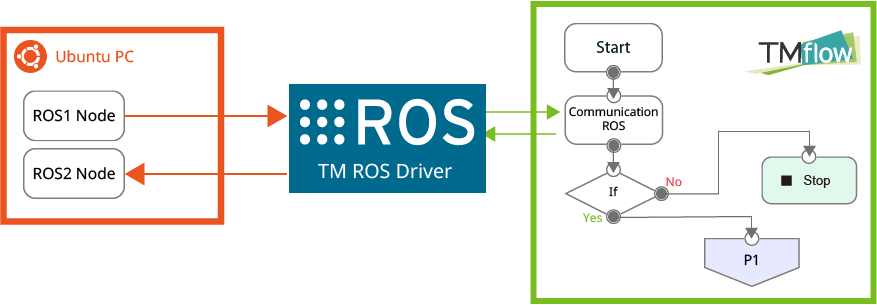
자체 개발된 프로그램을 사용하여 TM로봇을 자유롭게 제어
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row css=”.vc_custom_1597377250962{padding-bottom: 200px !important;}” id=”TMROSdriver”][vc_column][vc_column_text css=”.vc_custom_1616912276106{margin-bottom: 0px !important;}”]
TM ROS 드라이버는 자체 개발한 프로그램으로 TM 로봇을 제어하고자 하는 개발자들을 위해 설계되었습니다. TM ROS 드라이버는 TM 로봇의 작동 소프트웨어(TM flow)를 외부 프로그램과 연결해 사용자 필요에 따라 로봇의 제어장치를 중간에 전송할 수 있습니다.
 [/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]
[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1594348816882{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348831463{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text align=”center” css=”.vc_custom_1594348841485{margin-bottom: 0px !important;}”]
[/vc_column_text][/vc_column_inner][/vc_row_inner][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695838891{padding-top: 100px !important;background-color: #fafafa !important;}” id=”ConveyorTracking”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
Conveyor Tracking
[/mk_fancy_title][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][/vc_column][/vc_row][vc_row fullwidth=”true” fullwidth_content=”false” css=”.vc_custom_1610695928092{margin-bottom: 200px !important;padding-bottom: 50px !important;background-color: #fafafa !important;}”][vc_column width=”1/2″][vc_column_text css=”.vc_custom_1594286871201{margin-bottom: 0px !important;}”]
물체 조작 문제를 위한 최고의 솔루션
컨베이어 트래킹은 매우 정밀하게 움직이는 컨베이어 트래킹을 추적하기 위한 센서나 비전을 기반으로한 물체의 위치 및 방향에 대한 정보를 캡처 할 수 있습니다.
소프트웨어와 하드웨어의 완벽한 통합
추가 컨트롤러는 필요하지 않으며 카메라, 엔코더 및 EhterCAT 확장 모듈을 지정된 모델과 함께 사용할 수 있습니다.[/vc_column_text][/vc_column][vc_column visibility=”hidden-sm” width=”1/2″][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2018/07/addon_section1_img.png” image_size=”full” animation=”fade-in”][/vc_column][/vc_row][vc_row id=”api”][vc_column][mk_fancy_title margin_bottom=”0″ font_family=”none”]
TM Robot 관리 API
[/mk_fancy_title][vc_column_text css=”.vc_custom_1610698110430{margin-bottom: 0px !important;}”]
IoT관리를 위해 TM로봇을 시스템에 연결
[/vc_column_text][mk_divider style=”thick_solid” divider_width=”custom_width” custom_width=”100″ border_color=”#78be21″ margin_bottom=””][vc_column_text css=”.vc_custom_1625207755566{margin-bottom: 0px !important;}”]최근 기업들은 공장에 IoT관리 시스템을 도입하고 있습니다. 모니터링 및 분석을 위해 모든 장비 및 장치에서 데이터를 수집합니다. TM Robot 관리 API는 시스템 개발자가 TM 로봇을 기존 시스템에 손쉽게 통합할 수 있도록 지원합니다. 따라서 공장에서 IoT를 활용하여 비즈니스 가치 및 ROI를 향상 시킬 수 있도록 지원합니다.[/vc_column_text][vc_row_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484496043{margin-bottom: 0px !important;}”]
 구축의 용이성
구축의 용이성
Linux 또는 Ubuntu와 같은 플랫폼 지원
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484573285{margin-bottom: 0px !important;}”]
 다중 연결
다중 연결
IoT 관리 실현
[/vc_column_text][/vc_column_inner][vc_column_inner width=”1/3″][vc_column_text css=”.vc_custom_1616484610773{margin-bottom: 0px !important;}”]
 다중 인터페이스
다중 인터페이스
무제한 언어와의 빠른 통합
[/vc_column_text][/vc_column_inner][/vc_row_inner][vc_column_text css=”.vc_custom_1611039300804{margin-bottom: 0px !important;}”]
TM Robot 관리 API는 여러 데이터 통신 인터페이스를 지원하여 IoT 관리를 위해 모든 제조 데이터를 관리하는 효율성을 향상시킵니다.
[/vc_column_text][mk_image src=”https://www.tm-robot.com/wp-content/uploads/2021/01/addon_api_img1.png” image_size=”full” align=”center”][vc_column_text css=”.vc_custom_1611814281088{margin-bottom: 0px !important;}”]
다수의 TM 로봇에서 데이터를 수집하여 기존의 관리 시스템에 게시하여 더 많은 애플리케이션을 제공
[/vc_column_text][/vc_column][/vc_row]