
원활한 통합을 위한 포괄적인 TM ROS 저장소
유연성
정밀성
효율성
ROS와의 원활한 통합을 촉진하기 위해 Techman Robot은 다양한 TMflow 및 ROS 버전에 맞춤화된 포괄적인 TM ROS 저장소 제품군을 제공합니다. 이 저장소들은 개발자에게 TM AI 코봇으로 ROS 기반 애플리케이션을 구축하는 데 필요한 도구를 제공하여 정밀한 모션 제어와 효율적인 데이터 수집을 가능하게 합니다. 다양한 ROS 버전이나 특정 TMflow 구성으로 작업할 때, 이 저장소들은 강력하고 지능적인 로봇 솔루션을 만드는 데 필요한 유연성과 리소스를 제공합니다.
제품 개요
Techman Robot은 GitHub에서 이용 가능한 포괄적인 TM ROS 저장소 제품군을 제공합니다. 이 저장소들은 다양한 TMflow 및 ROS 버전에 대응하도록 체계적으로 정리되어 있어 개발자의 호환성과 사용 편의성을 보장합니다.
tmr_ros1
지원되는 ROS 버전
- ROS Melodic Morenia
- ROS Noetic Ninjemys
지원되는 TMflow 버전
- TMflow 1.76 ~ 1.88
tmr_ros2
지원되는 ROS 버전
- ROS 2 Dashing Diademata
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
지원되는 TMflow 버전
- TMflow 1.76 ~ 1.88
tm2_ros1
지원되는 ROS 버전
- ROS Noetic Ninjemys
지원되는 TMflow 버전
- TMflow 2.14또는 그 이상
tm2_ros2
지원되는 ROS 버전
- ROS 2 Foxy Fitzroy
- ROS 2 Humble Hawksbill
지원되는 TMflow 버전
- TMflow 2.14또는 그 이상
편의를 위해 아래 표에서 사용 가능한 저장소에 대한 자세한 내용을 참조하십시오.
각 저장소에는 일반적으로 다음 항목이 포함됩니다:
TM ROS Driver
ROS 노드가 로봇에서 데이터를 수집하고 로봇의 움직임을 원활하게 제어할 수 있도록 하는 인터페이스입니다.
Message Files (msgs)
TM ROS Driver와 상호 작용하는 데 필요한 필수 파일입니다.
Sample Codes
개발자가 프로젝트에서 TM ROS Driver의 기능을 빠르게 이해하고 구현할 수 있도록 돕기 위해 설계된 예제 코드 모음입니다.
3D Models(1)
시각화 및 시뮬레이션에 필요한 메시, URDF 및 Xacro 파일을 포함한 TM 로봇용 포괄적인 3D 모델 세트입니다.
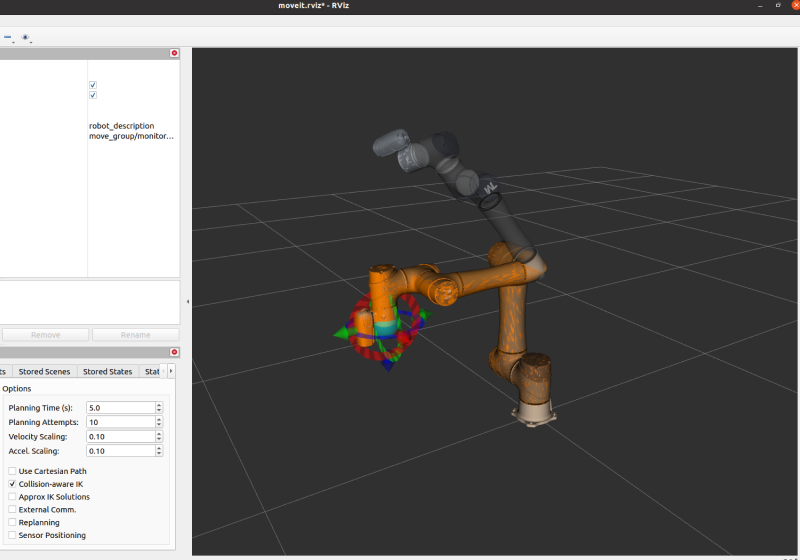
Simulation-related Files(2)
TM AI 코봇이 Gazebo 및 MoveIt과 같은 ROS 시뮬레이터 내에서 작동할 수 있도록 하여 가상 환경에서의 사실적인 테스트 및 개발을 가능하게 하는 파일입니다.
TM ROS 드라이버
TM ROS Driver는 토픽 퍼블리셔(Topic Publisher), 서비스 서버(Service Server), 액션 서버(Action Server)의 세 가지 핵심 구성 요소로 이루어진 인터페이스 프로그램으로, 각각 개발자의 ROS 노드와 로봇 간의 통신 및 제어를 촉진하는 중요한 역할을 수행합니다.
01
Topic Publisher
Topic Publisher는 이더넷 슬레이브를 통해 TMflow와 연결하고, 로봇에서 데이터(로봇 상태, 관절 상태, 툴 포즈, IO 등)를 수집하여 ROS 토픽으로 데이터를 발행합니다. 개발자(ROS 노드)는 이러한 ROS 토픽을 구독하여 데이터를 활용할 수 있습니다.
- /feedback_states 에 피드백 상태(로봇 위치, 오류 코드, IO 상태 등 포함) 발행
- /joint_states 에 관절 상태 발행
- /tool_pose 에 툴 포즈 발행
02
Service Server
개발자의 ROS 노드는 이러한 ROS 서비스에 요청을 보내 로봇을 제어할 수 있습니다.(3)
- /tm_driver/send_script (tm_msgs/srv/SendScript.srv 참조): 로봇 스크립트(TM Robot Expression)를 Listen 노드로 전송
- /tm_driver/set_event (tm_msgs/srv/SetEvent.srv 참조): "Stop", "Pause" 또는 "Resume" 명령을 Listen 노드로 전송
- /tm_driver/set_io (tm_msgs/srv/SetIO.srv 참조): 디지털 또는 아날로그 출력값을 Listen 노드로 전송
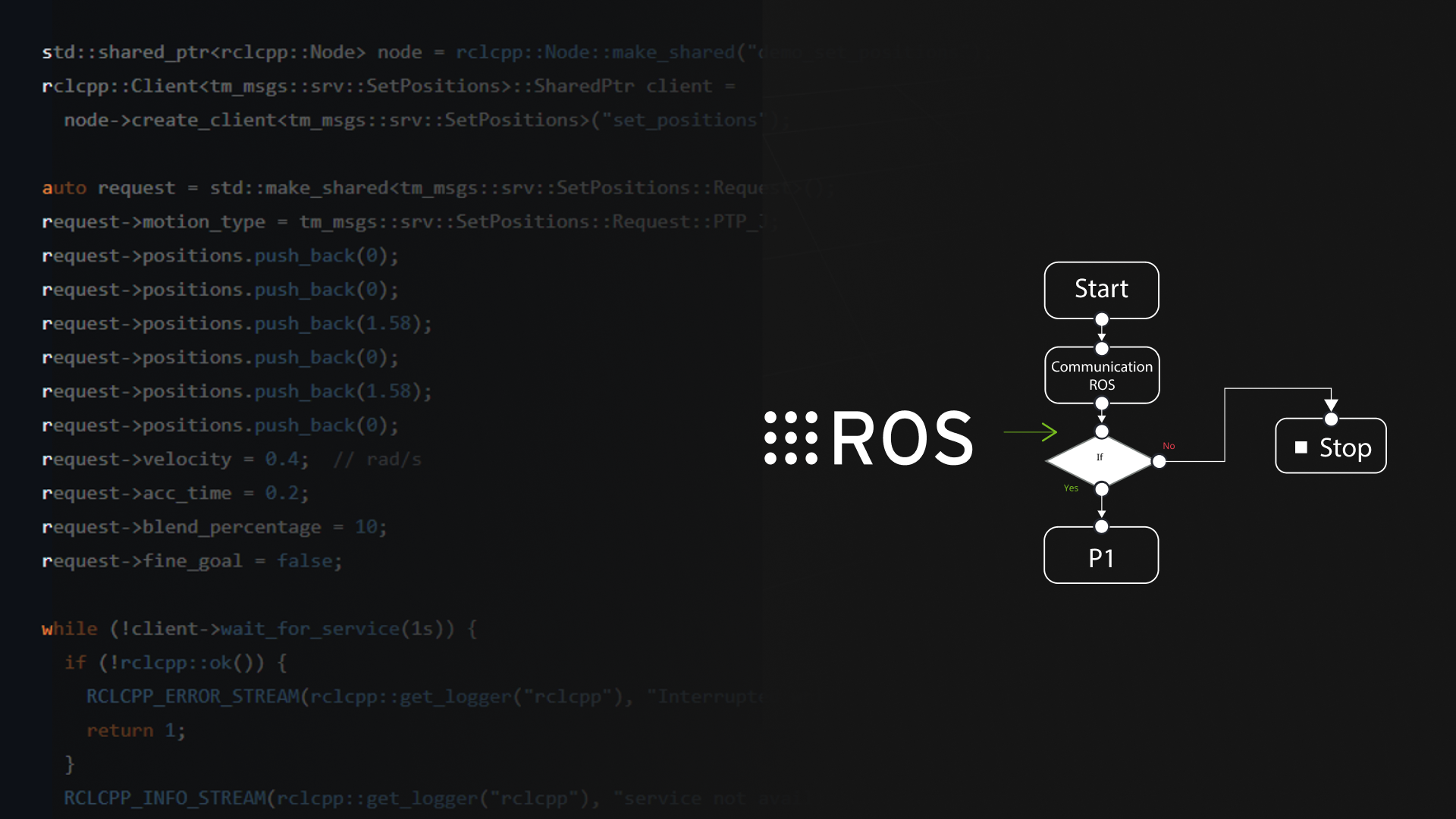
- /tm_driver/set_position (tm_msgs/srv/SetPosition.srv 참조): 모션 명령을 Listen 노드로 전송합니다. 모션 유형에는 PTP, LINE, CIRC 및 PLINE이 포함되며, 위치 값은 관절 각도(J) 또는 툴 포즈(T)입니다. 자세한 내용은 "Expression Editor and Listen Node" 매뉴얼을 참조하십시오.
03
Action Server
Action Server는 MoveIt에서 생성된 궤적을 변환하고 로봇 모션을 구동하는 액션 인터페이스 역할을 합니다.
- MoveIt과의 원활한 통합을 위한 /follow_joint_trajectory 상의 액션 인터페이스
참고:
- 모든 로봇 모델이 모든 저장소에서 지원되는 것은 아니며, 개발 중인 모델은 수시로 업로드될 예정입니다. Techman Robot의 GitHub 페이지에 게시된 내용을 기본 소스로 참조해 주십시오. 질문이나 필요한 사항이 있으시면 당사에 문의해 주십시오.
- 모든 TM ROS 저장소가 시뮬레이션 관련 파일을 제공하는 것은 아니며, 개발 중인 파일은 수시로 업로드될 예정입니다. Techman Robot의 GitHub 페이지에 게시된 내용을 기본 소스로 참조해 주십시오. 질문이나 필요한 사항이 있으시면 당사에 문의해 주십시오.
- ROS에 의한 모션 제어를 위해서는 Listen Server를 활성화하는 프로젝트를 실행해야 합니다 (Listen Node 사용).