
多元外接埠,告別繁雜佈線- 系統整合與設計指南
更新日期 2026 / 05 / 29
1. 介紹
1.1 背景與潛在瓶頸
標準介面無法提供高夾持力夾爪與高階工具足夠的電力,嚴重限制應用範疇,導致無法使用高負重或高扭力作業所需的工具。此外,相機和工具的外接佈線為最主要的故障點。在機器人執行複雜動作時,外接佈線極易發生勾扯、摩擦損耗、連接處疲勞損傷,進而引發成本高昂且難以預測的停機維修。
1.2 硬體概述
達明機器人AI Cobot S 系列(硬體版本5.04)整合高功率架構,不僅突破標準介面的功率限制,更徹底根除外接佈線的故障風險,確保機器人在重載應用中發揮最大效能。
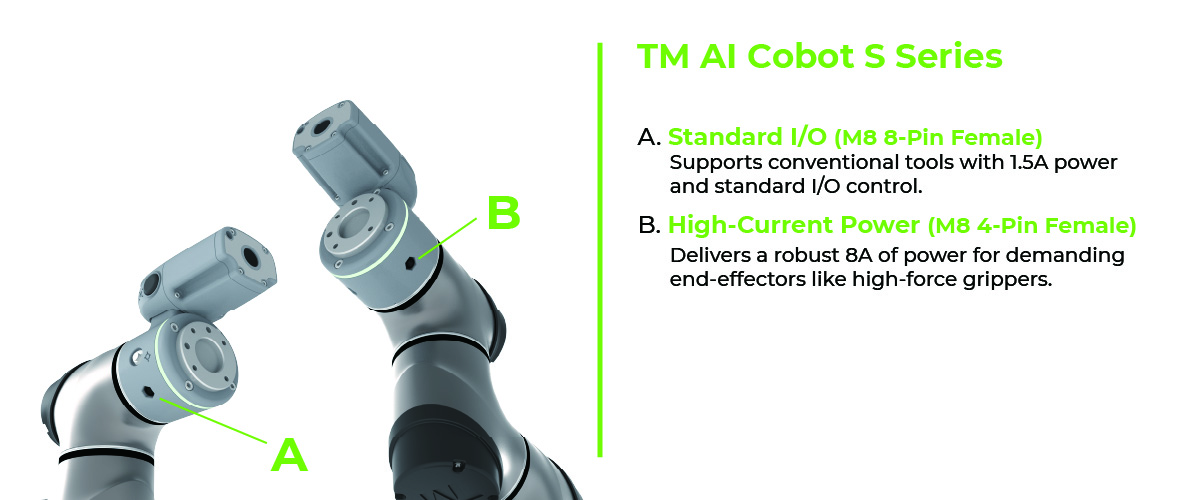
A. 標準 I/O(M8 8-Pin 母座)
支援常見工具,提供 1.5A 電源及標準 I/O 控制
B. 高電流電源(M8 4-Pin 母座)
為高負載末端效應器(如:高夾持力夾爪)提供穩定的 8A 電力。
達明機器人AI Cobot S 系列的 X 機型亦支援整合外接相機與周邊設備,根除線路勾扯與電力不穩的風險。
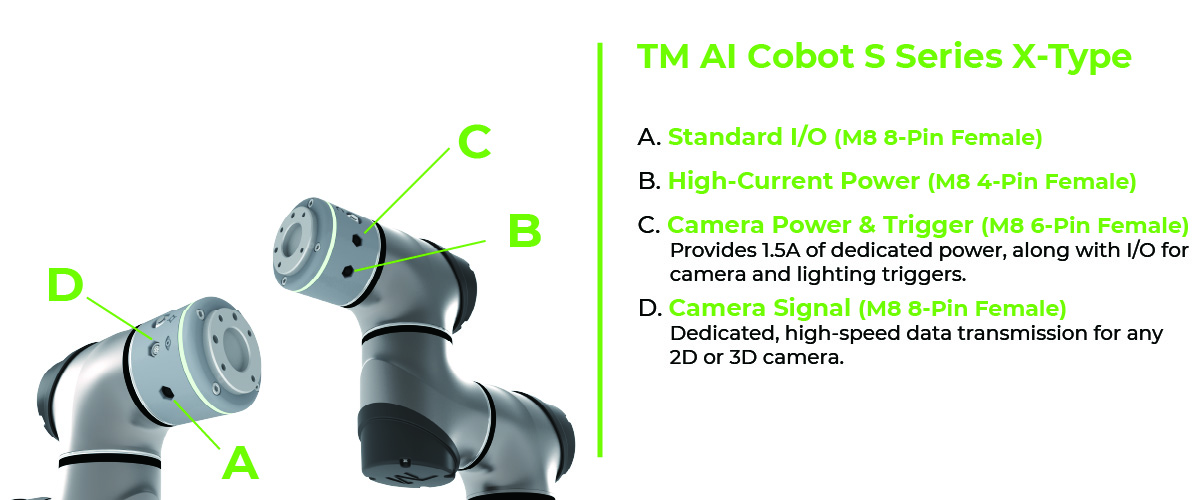
A. 標準 I/O(M8 8-Pin 母座)
B. 高電流電源(M8 4-Pin 母座)
C. 相機電源與觸發(M8 6-Pin 母座)
提供 1.5 A 專用電源,以及相機與照明觸發用之I/O。
D. 相機訊號(M8 8-Pin 母座)
具備高速資料傳輸功能,專為2D 與 3D 相機設計。
1.3 應用範圍
本文件以硬體版本 (HW)5.04為基礎,針對不同應用情境提供「零外接佈線」參考範例。以下內容僅適用 達明機器人AI Cobot S 系列之對應系統。

2. 參考範例
2.1 範例1
| 應用領域 | 半導體應用 | |
| 情境 | 料盒(magazine)取放。 | |
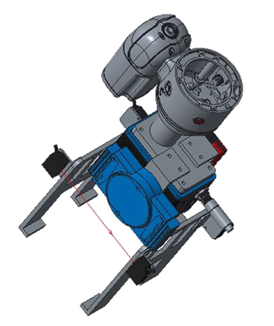
| 需求描述 | 高負載料盒需配置一對標準型夾爪,夾爪需要較高的功率輸入。 | |
| 建議設備 | IAI 對開式夾爪:RCP6-GRT7B。 | |
建議連接方式 | ||
 | ||
建議設計方式 | ||
 | 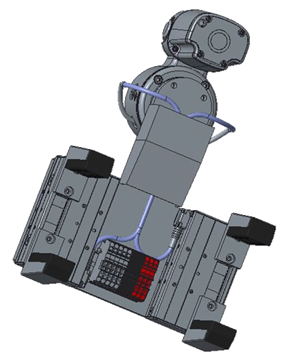 |  |
2.2 範例2
| 應用領域 | 半導體 | |
| 情境 | 料盒(magazine)取放。 | |
| 需求描述 |
| |
| 建議設備 | 1. 台達高負載電動夾爪:RS-GPA400。 2. IO 轉 RS-485 模組:研華ADAM 4000 系列。 3. 光感測器:OMRON E3Z-D61。 | |
Suggested Connection | ||
 | ||
Suggested Design | ||
 | 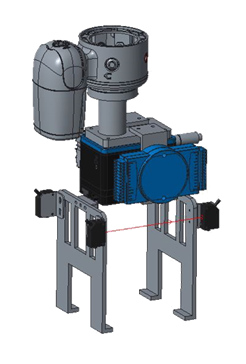
|  |
附錄A:建議夾爪機型
以下夾爪可實現「零外接佈線」設計:
# | 製造商 | 型號 | 夾持力(N) | 作動行程(mm) | 作動速度(mm/s) | 控制方式 |
| 1 | Robotiq | AG Hand-E | 20-185 | 50 | 20-150 | I/O |
| 2 | OnRobot | 2FG7 | 20-140 | 38 | 16-450 | RS485 |
| 3 | OnRobot | 2FG14 | 40-280 | 50 | 16-450 | RS485 |
| 4 | Zimmer | HRC-03 | 50-190 | 20 | 50 | I/O |
| 5 | Schunk | Co-Atc EGP-C | 35-140 | 12 | 30 | I/O |
| 6 | Gimatic | Kit-TM-J | 24 | 53 | 220 | I/O |
| 7 | SMC | LEHR | 60-140 | 50 | 5-100 | RS485 |
| 8 | New Era | ELCT1 | 60-100 | 20 | 11-22 | RS485 |
| 9 | RGK | EGN-66 | 30-50 | 12 | 15-30 | I/O |
以下真空夾爪皆可實現「零外接佈線」設計:
# | 製造商 | 型號 | 最大真空度(kPa) | 最大真空流量(L/min) | 最大負載 | 控制方式 |
| 1 | EPick | -80 | 12 | 16 | 16 | I/O |
| 2 | VGC10 | -80 | 12 | 16 | 16 | RS485 |
| 3 | ECBPi | -75 | 12 | 10 | 10 | I/O |
| 4 | SGE e-hand | -57 | 5 | 3 | 3 | I/O |
| 5 | ZXPE5 | -74 | 4.5 | 5 | 5 | I/O |
| 6 | e-VEE | -66.6 | 7.5 | 20 | 20 | I/O |
這篇文章對您有幫助嗎?