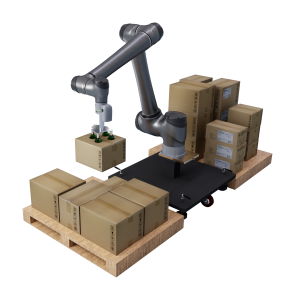
• Our TM25S is aim to handle the application of large work piece Pick&Place. For example: push stack, machine tool material pick and place, automobile industry assembly.
• Mixed boxes with unknown weights palletizing and de-palletizing is also a main market to TM25S. Due to this application, two difficulties must to be considered: Sudden change of the payload & unknown payload to the robot. For the above difficulties, we develop respective features to fit the application!
Payload Transition Function
The payload transition function can help you to solve sudden payload transient error. It provides a linear payload interpolation to change smoothly.
Configuration of Force & Torque Monitoring
For unknown payload application, e.g. mix boxes de-palletizing, it is hard to define payload value for robot.
You can select your Force & Torque Monitoring type with robot in “fence-less workspace”, “in collaborate workspace” or “in fence”.
No Need to “Re-Teach” from Beginning
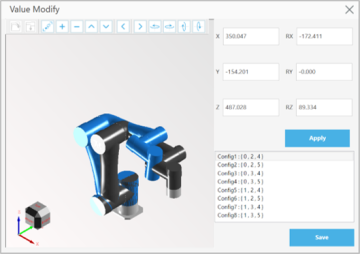
Point & Base Value Modified Function
Directly modify the Point value as you wish, the target position will be shown in the UI (blue).
Directly modify the Base value, you don’t need to re-teach the base which saves lots of time!
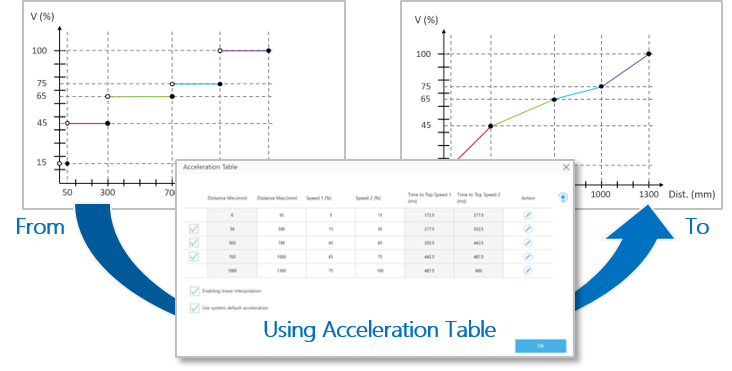
Smart Acceleration Configure Tool
The acceleration between points can be easily configured using the Acceleration Table. You can set your target speed and time duration between points just in the table, the project will automatically refer the values you set. You don’t need to adjust these in each point, which highly reduce the teaching/tuning efforts!
No Need to “Re-Start” from Beginning
The robot can now recover from error and continue to execute the project after you finish trouble shooting.
You can resume the project from these errors:
Emergency situation from ESTOP
Collision situation from Power & Force Limiting
While error happens, robot may drop from Pe to Ps. The robot can be resumed with PTP motion to Pe. Then resume the project by PLAY button.
I We Support Your Devices
Support Path Offset in Script Command
You can online correct your path with external sensor.
Especially in Welding application. With external sensor feedback to robot trajectory, the path can be more accurate and more precise to avoid possible deformation.
Also, to apply the Gluing application on uncertain distance of surface following, the path can be corrected by ranger sensor and this function.
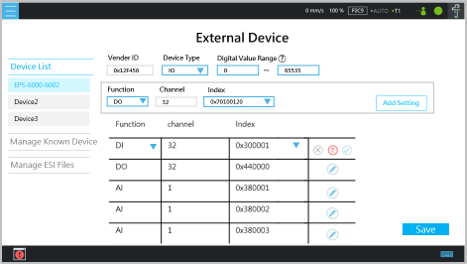
Support User-Defined EtherCAT Device
Now, we can recognize your EtherCAT devices! You can add your EtherCAT Digital I/O devices and Analog I/O devices as you wish.
Expand Secondary Development
> TMcraft Service
Customized Daemon program, which always runs at the background.
> TMcraft Node
Customi zed Node UI, which can be used within a Flow Project.
> TMcraft Shell
A whole page of Customized UI covered above TMflow, which can be used as a dashboard or an unique UI.
> TMcraft Toolbar
Customized Toolbar, which can assist user in all sorts of scenarios.
> TMcraft Packer
A stand alone packer to pack your TMcraft plugins.
Test your project with TMflow 2.16 Simulator!
We combine “Client” & “Simulator” together. You can now run TMflow with virtual robot in your PC/NB. No need to stop the real robot to test your procedure!
1. Both TM AI Cobot and TM AI Cobot S series available.
2. Test your project logic including simulated DI/AI signals.
3. Test your Listen Node and Network Node communication.
4. Test your TMcraft Node, Shell & Toolbar right after development.
5. Simulate your robot programming and motion.
6. Project import and export as from the real robot.
Released by Product Development Dept. Phillip Hsiao