
達明機器人宣佈深化與NVIDIA、QCT的策略合作,正式推出「Physical AI 開發套件(Physical AI Development Package)」。這套業界首創的解決方案,標誌著達明機器人已成功串聯從資料採集、算力支撐到終端部署的完整鏈條,成為台灣 AI 硬體供應鏈中,將數位智慧轉化為實體生產力的「最後一哩路」 。
雙引擎戰略核心:一套大腦,賦與機器人多元型態
不同於市場過往僅關注單一機器人型態,達明機器人強調 Physical AI 的核心價值在於「跨平台的智慧賦能」。本次發表的開發套件不僅是為人型機器人 TM Xplore I 量身打造,更是其「AI 雙引擎」戰略(協作機器人 Cobot + 人型機器人 Humanoid)的智慧中樞。透過同一個共享的 AI 架構與開發框架,企業能將 AI 視覺與 VLA 多模態模型快速導入既有的 AI Cobot 產線,或部署至未來的人型機器人應用,極大化研發投資報酬率並降低重複開發成本。
Physical AI 技能訓練的「使用者旅程」:加速工業落地,極大化降低 TCO
展會現場完整呈現了 Physical AI 技能訓練的三大關鍵階段,旨在解決企業導入自動化時面臨的「客製化成本高」與「部署週期長」兩大痛點。此整合工作流程全面導入 NVIDIA Isaac GR00T 人形機器人開放式開發平台,用以彌合數位開發與現實世界之間的差距,有效降低總體擁有成本(TCO)並縮短建置週期。
第一階段:示範與高精度資料採集
高品質的數據是 Physical AI 的基石。達明機器人與晶翔機電(j-mex)合作,展示如何透過 VR 裝置與專屬 MOXI 穿戴式動作捕捉衣,將人類專家經驗數位化。整合 NVIDIA Isaac Teleop 技術後,系統可進行高保真遠端操作與即時動作重定向,同步控制虛擬與實體機器人。此方法能精準捕捉人類在複雜、非結構化環境中的細緻動作,相較傳統教導方式,更有助於機器人快速學習高靈巧度的工業任務。
第二階段:AI 基礎架構與多模態技能學習
在 AI 算力與模型訓練方面,達明機器人整合 QCT 專為 Physical AI 打造的基礎架構,並以 NVIDIA 加速運算硬體為核心,包含 NVIDIA HGX H200 系統與最新 NVIDIA RTX PRO 6000 Blackwell 架構 GPU。此基礎架構運用 NVIDIA Cosmos 3 開放式世界模型(Open world models)進行高擬真的現實資料生成,並部署 NVIDIA Isaac GR00T 1.7 開放式推理 VLA(Vision-Language-Action)模型。該模型賦予機器人進階的視覺感知、語言理解與機器人動作推理能力,讓機器人不再只是執行固定指令,而能理解人類意圖、判讀環境並進行任務層級的決策。
第三階段:高價值工業場景部署—從倉儲搬運到動態無序抓取
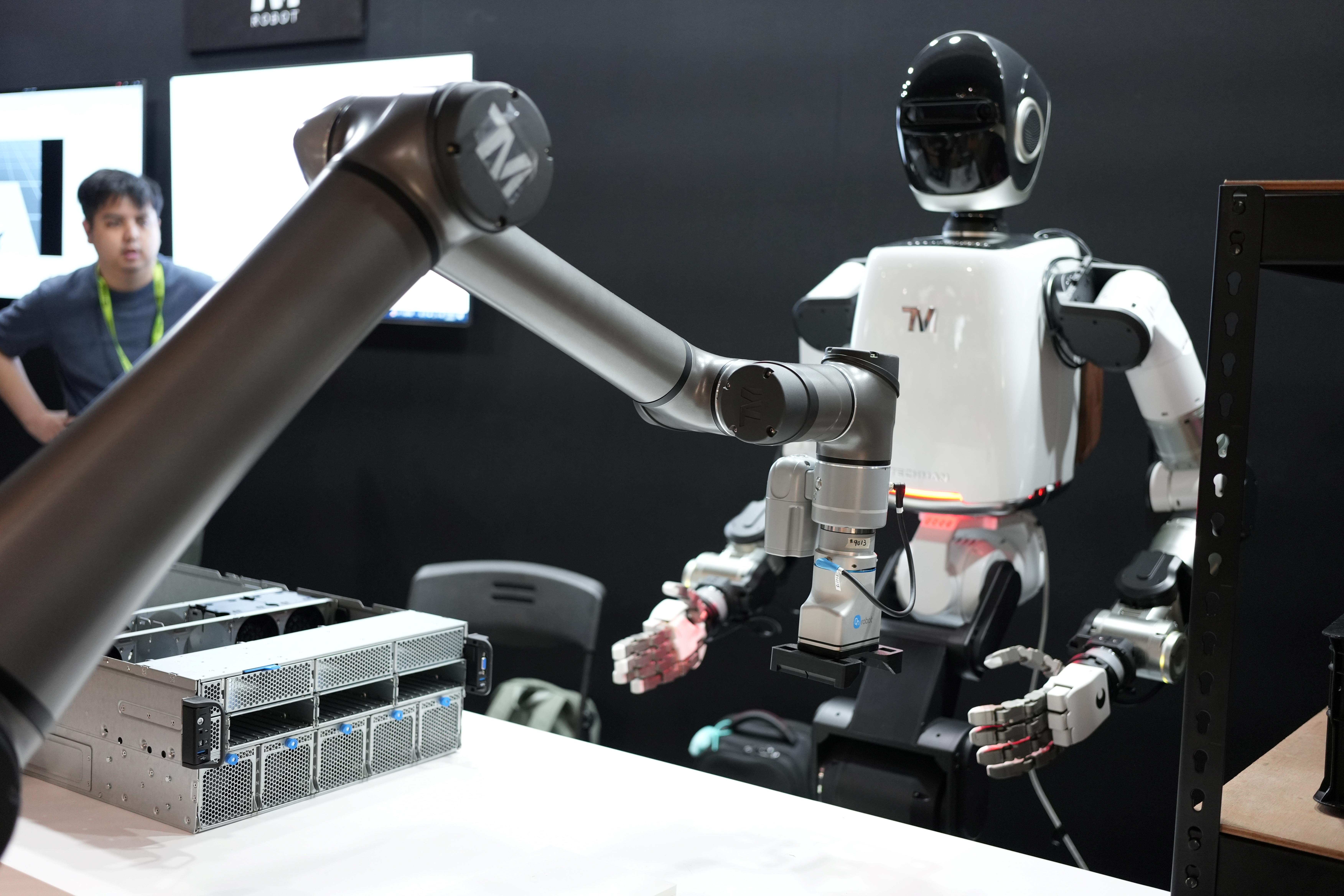
訓練完成的模型將先於 NVIDIA Isaac Lab Arena 中進行虛擬評估,再部署至 TM Xplore I 等實體機器人系統。透過 NVIDIA Isaac ROS 串聯感測器、致動元件與 AI 功能,達明機器人現場展示了整合既有產線的 AI 伺服器製造流程。此應用超越傳統的物料搬運,展現機器人在動態且非結構化生產環境中的強大執行力,也凸顯 Physical AI 在半導體、電子組裝與智慧物流等高價值產業的落地潛力,滿足高階自動化對精準度、適應力與操作可靠性的嚴格要求。
達明機器人營運長黃識忠表示:「台灣擁有全球最完整的 AI 硬體生態系,而達明機器人的使命,就是將這些驚人的數位算力轉化為實體產線的真實生產力與獲利能力。我們與 NVIDIA 及 QCT 的合作,已從打造『聰明的機器人』進一步發展為建構可規模化、能創造價值的 Physical AI 生態系。透過『Physical AI 開發套件』,我們正在降低企業導入 AI 機器人的門檻,並縮短從數位孿生開發到真實生產部署的距離。這將是全球高階自動化落地的重要轉折點。」
達明機器人誠摯邀請各界於 COMPUTEX 2026 / NVIDIA GTC Taipei 期間蒞臨攤位,親眼見證這場將數位算力轉化為實體戰力的技術革命。
