
Tesollo Inc.
製品の特徴
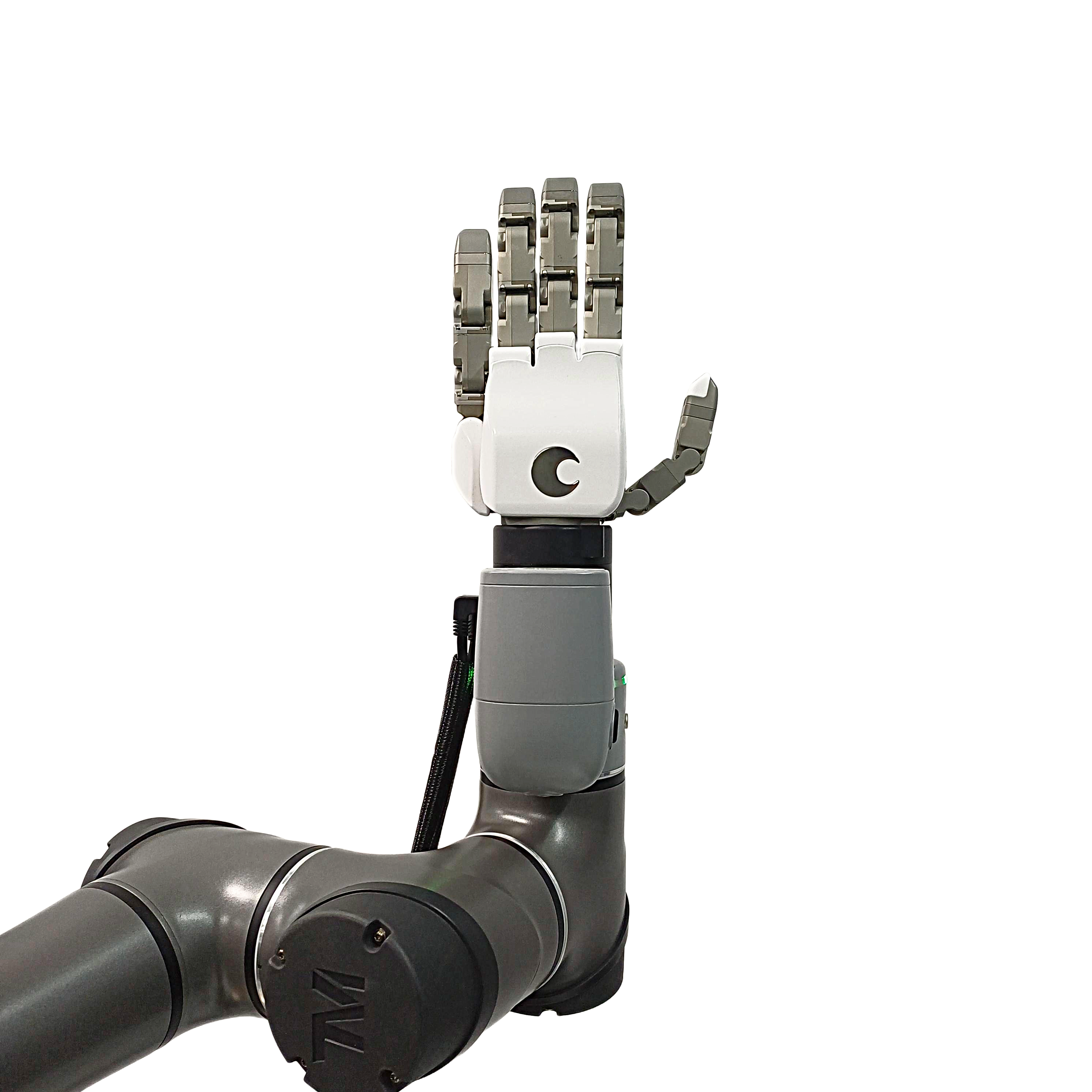
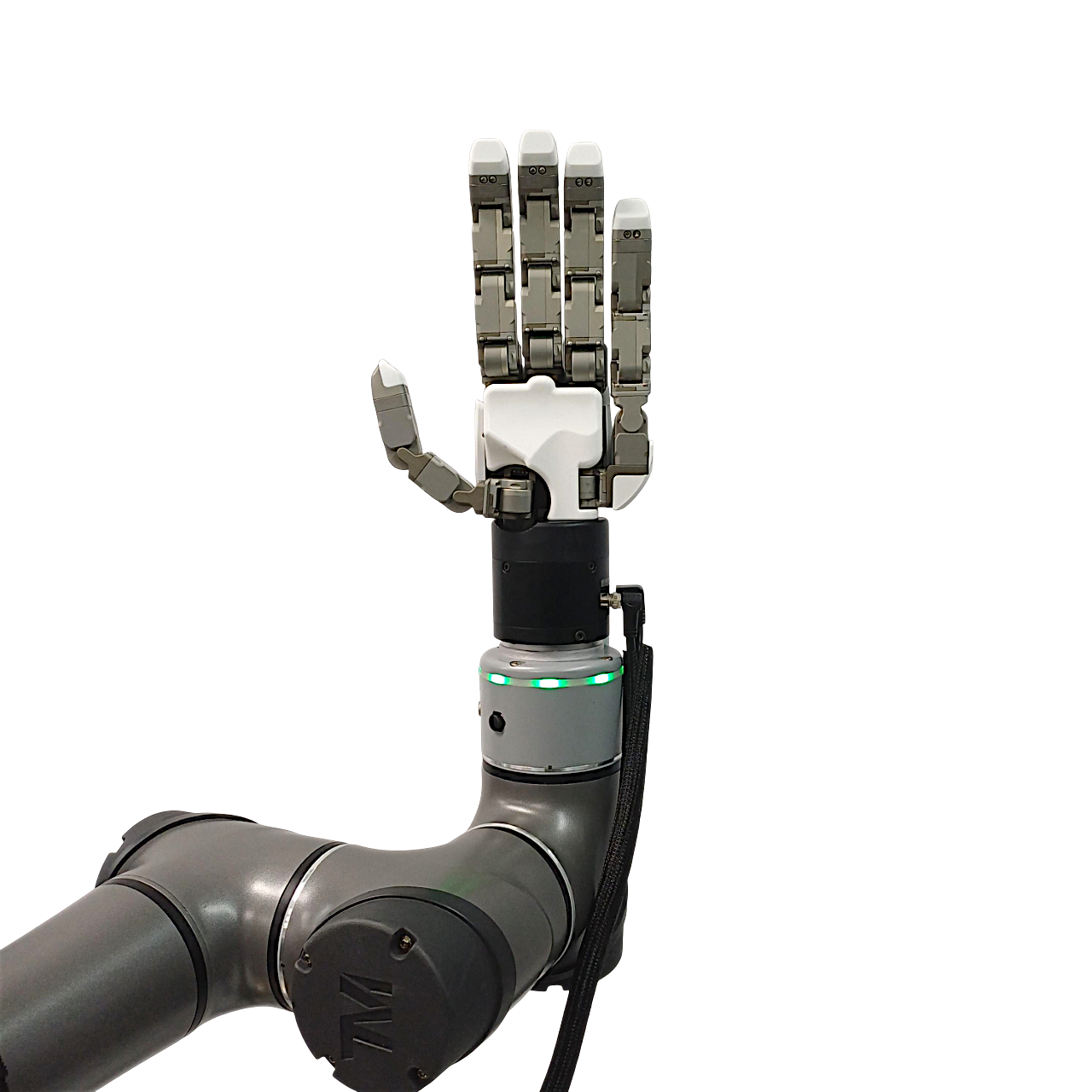
A robotic hand capable of human-level gripping and manipulation.
The DG-5F is a fully actuated, 5-finger anthropomorphic robotic hand that offers 20 degrees of freedom (DoF) for high-dexterity, human-like manipulation.
With independent joint control and a design modeled after the human hand, the DG-5F enables intuitive tool use and precise object handling in research, industrial, and service robotics.
- Independent Joint Control
All 20 joints are independently driven, enabling complex hand motions and precise, coordinated manipulation for advanced tasks. - Human-Like Design
Modeled after the size and proportions of an adult male hand, the DG-5F is optimized for human-centric environments.
It allows intuitive interaction with tools, devices, and human-oriented workspaces. - Various Grip Modes
Supports various grip patterns, including:
Pinch Grip – grasping with fingertips
Power Grip – full-hand, firm grasp
Precision Grip – using partial finger segments
Grip behavior is adaptable based on object size, shape, and weight. - Advanced Sensor Integration (Optional)
Optional high-precision force sensors at the fingertips enable real-time tactile feedback.
Functions include slip detection, adaptive force control, and environmental interaction in dynamic tasks. - Robust Materials and Durability
Built from high-strength, lightweight materials for robust performance in high-cycle and high-speed operations.
Suitable for both industrial and research applications. - Flexible Programming and Integration
Includes a user-friendly control interface with full ROS2 compatibility, allowing seamless integration with existing robotic platforms, simulators, and control systems. - Versatile Applications
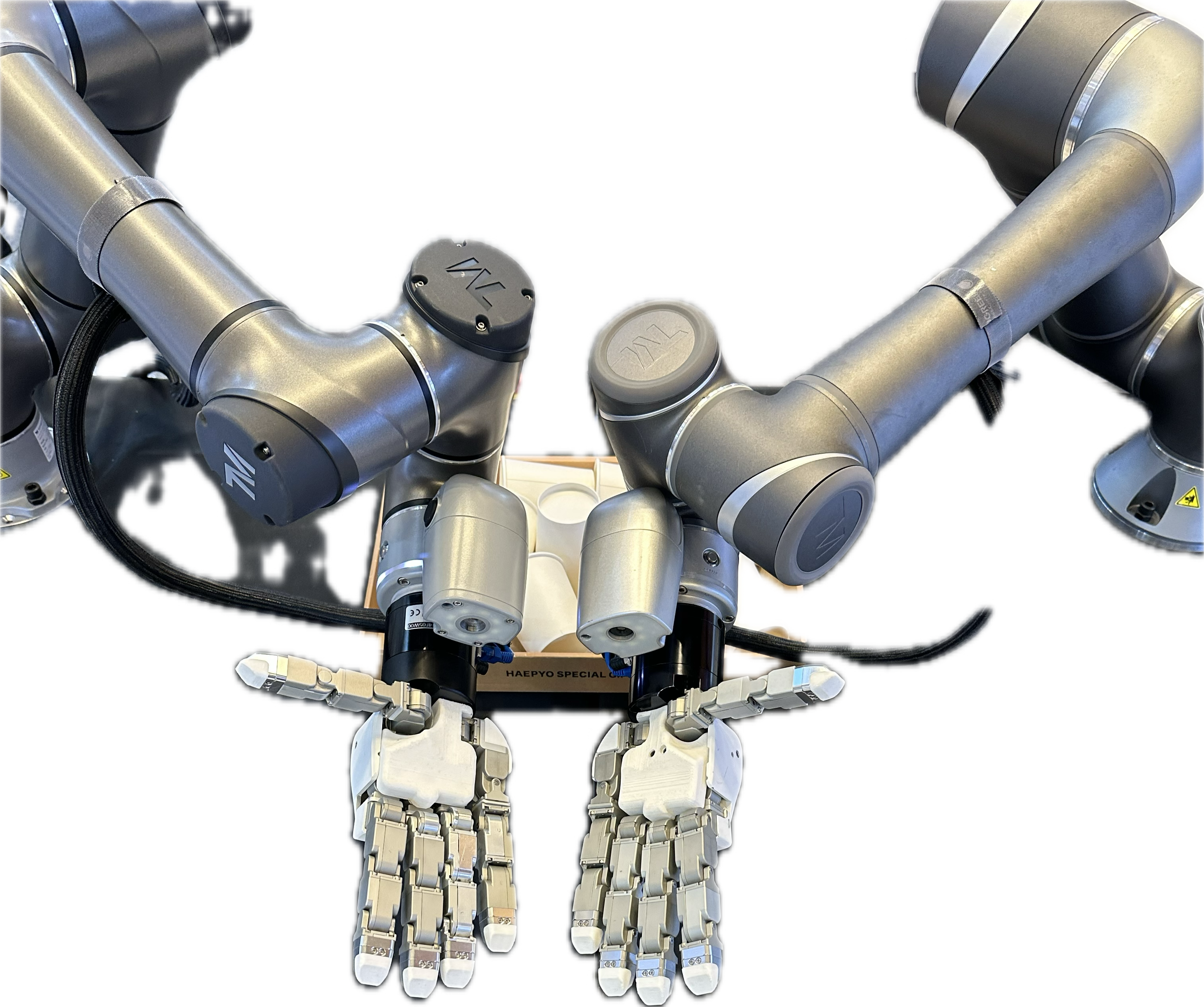
Research & Development: AI-based manipulation studies, human-robot interaction, dexterous control research
Industrial Automation: Precision assembly, device operation, logistics handling
Service Robotics: Human-assistive tasks, teleoperation, object interaction in human environments
TM Component
Product Manual
Power supply : 24[V]
Current Consumption : Max. 10[A]
Communication : Modbus (RTU, TCP), EtherNet(TCP/IP)
Control Frequency : 250 Hz
Encoder : Absolute Encoder
Degrees of Freedom : 20 DoF (4 DoF per finger)
Gripping Capacity
Pinching Payload (Rated, Max) : 2.5, 5 [kg], Envelop Payload (Rated, Max) : 10, 20 [kg]
*Performance may depending on friction.
Weight : 1,763[g]
アームモデル
ハードウェア
ソフトウェア