
More Ports, Zero Cords - System Integration & Design Guide
Updated on 2026 / 05 / 27
1. Comprehensive Information
1.1 Background and Hidden Bottlenecks
Standard interfaces lack the power required for high-force grippers and advanced tooling. This severely limits application scope, preventing the use of tools needed for heavy lifting or high-torque tasks. External wiring for cameras and tools is a primary point of failure. It is highly prone to snagging during complex movements, wear and tear from friction, and connection fatigue, leading to costly, unpredictable downtime.
1.2 Hardware Overview
The Hardware 5.04 TM AI Cobot S Series integrate high-power architecture features a specialized internal design that overcomes the power limitations of standard interfaces while eliminating the failure risks associated with external cabling, ensuring peak performance for heavy-duty applications.
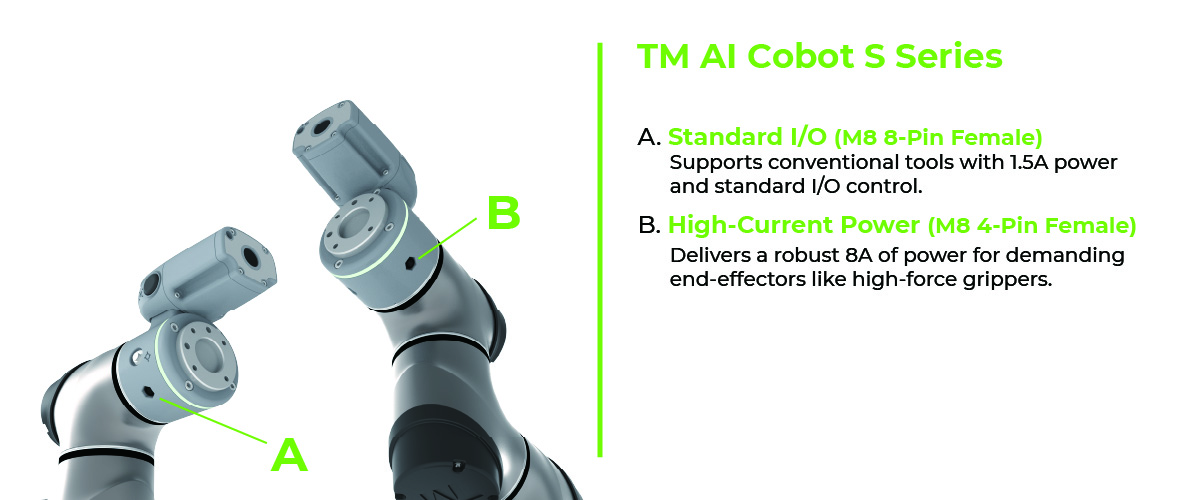
A. Standard I/O (M8 8-Pin Female)
Supports conventional tools with 1.5A power and standard I/O control.
B. High-Current Power (M8 4-Pin Female)
Delivers a robust 8A of power for demanding end-effectors like high-force grippers
The X-Type of Hardware 5.04 TM AI Cobot S Series are also capable of integrating external cameras and peripherals, also seamlessly eliminating the risks of cable snagging and power instability.
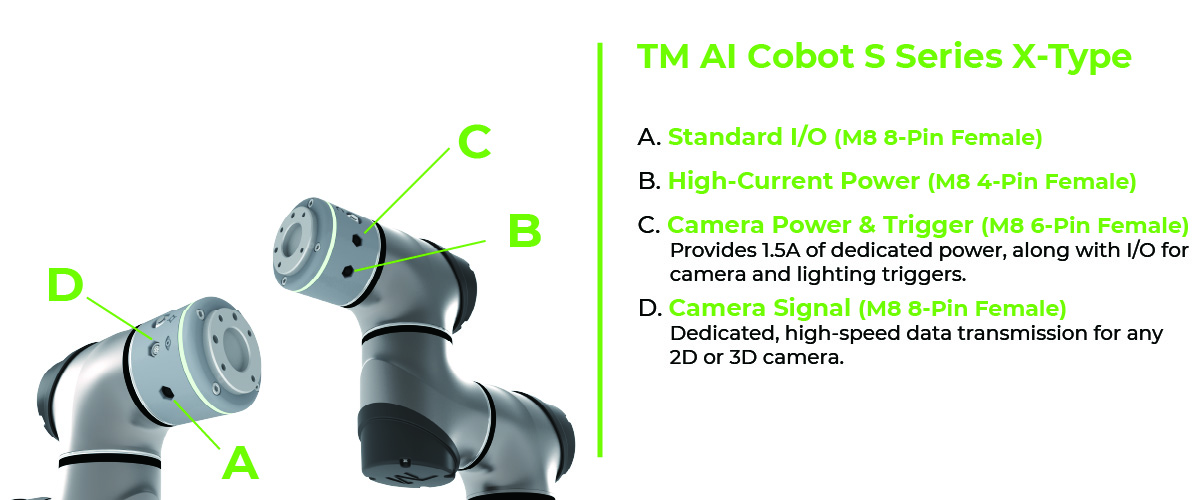
A. Standard I/O (M8 8-Pin Female)
B. High-Current Power (M8 4-Pin Female)
C. Camera Power & Trigger (M8 6-Pin Female)
Provides 1.5A of dedicated power, along with I/O for camera and lighting triggers.
D. Camera Signal (M8 8-Pin Female)
Dedicated, high-speed data transmission for any 2D or 3D camera.
1.3 Applicability
This document describes zero external cabling design reference using HW5.04 regarding to different application. The following contents are only applicable to the corresponding system of TM AI Cobot S Series.

2. Design Reference
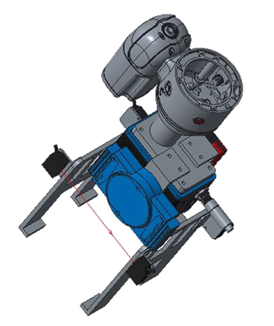
2.1 Reference 01
| Application | Semiconductor Application | |
| Scenario | Magazine pick and place | |
| Description | A heavy-loaded magazine requires two regular grippers. These two grippers require higher power input. | |
| Suggested Items | 1. IAI parallel gripper : RCP6-GRT7B | |
Suggested Connection | ||
 | ||
Suggested Design | ||
 | 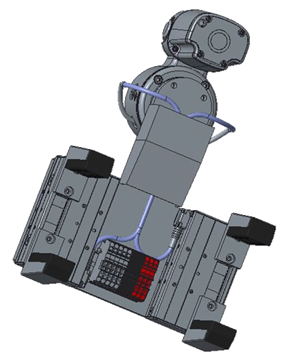 |  |
2.2 Reference 02
| Application | Semiconductor Application | |
| Scenario | Magazine pick and place | |
| Description | A heavy-loaded magazine requires a high payload electric gripper. Few sensors are required to make sure the magazine is properly gripped and also kept balance. An additional IO module is required to receive sensor signal and transfer to RS485 signal. | |
| Suggested Items | 1. DELTA high payload electric gripper: RS-GPA400 2. IO to 485 Module: ADAM 4000 Series 3. Optical Sensor: OMRON E3Z-D61 | |
Suggested Connection | ||
 | ||
Suggested Design | ||
 | 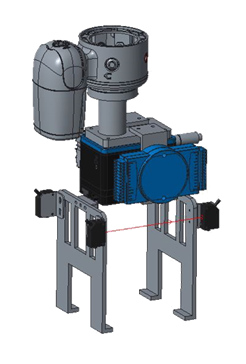
|  |
Appendix A Reference Grippers
The following Grippers that are capable of fulfills zero external cabling design.
# | Manufacturer | Model | Gripping Force(N) | Stroke (mm) | Speed(mm/s) | Control |
| 1 | Robotiq | AG Hand-E | 20-185 | 50 | 20-150 | I/O |
| 2 | OnRobot | 2FG7 | 20-140 | 38 | 16-450 | RS485 |
| 3 | OnRobot | 2FG14 | 40-280 | 50 | 16-450 | RS485 |
| 4 | Zimmer | HRC-03 | 50-190 | 20 | 50 | I/O |
| 5 | Schunk | Co-Atc EGP-C | 35-140 | 12 | 30 | I/O |
| 6 | Gimatic | Kit-TM-J | 24 | 53 | 220 | I/O |
| 7 | SMC | LEHR | 60-140 | 50 | 5-100 | RS485 |
| 8 | New Era | ELCT1 | 60-100 | 20 | 11-22 | RS485 |
| 9 | RGK | EGN-66 | 30-50 | 12 | 15-30 | I/O |
The following Vacuum Grippers that are capable of fulfills zero external cabling design.
# | Manufacturer | Model | Maximum Vacuum Degree (kPa) | Maximum Vacuum Flow Rate (L/min) | Max. load (Kg) | Control |
| 1 | EPick | -80 | 12 | 16 | 16 | I/O |
| 2 | VGC10 | -80 | 12 | 16 | 16 | RS485 |
| 3 | ECBPi | -75 | 12 | 10 | 10 | I/O |
| 4 | SGE e-hand | -57 | 5 | 3 | 3 | I/O |
| 5 | ZXPE5 | -74 | 4.5 | 5 | 5 | I/O |
| 6 | e-VEE | -66.6 | 7.5 | 20 | 20 | I/O |
Was this article helpful ?